|
Altoparlanti e segnali impulsivi
Si
sa, la musica è un'altra cosa, ma la risposta all'impulso è un indice
del comportamento di un altoparlante migliore del segnale sinusoidale
continuo
Premessa.
Si può dimostrare facendo uso di complessi strumenti matematici
che la risposta in frequenza e la risposta all'impulso di un sistema
qualsiasi sono strettamente correlate fra loro.
E molti programmi di analisi acustica attualmente eseguono una misura
del segnale riprodotto dal sistema sotto indagine, alimentato con un
segnale multifrequenza che può essere un MLS (segnale quasi
casuale contenente quasi tutte le frequenze) oppure un sinusoidale
vobulato nella banda richiesta, oppure qualche altro tipo di segnale
noto, e producono contemporaneamente i due grafici della fig. 01.
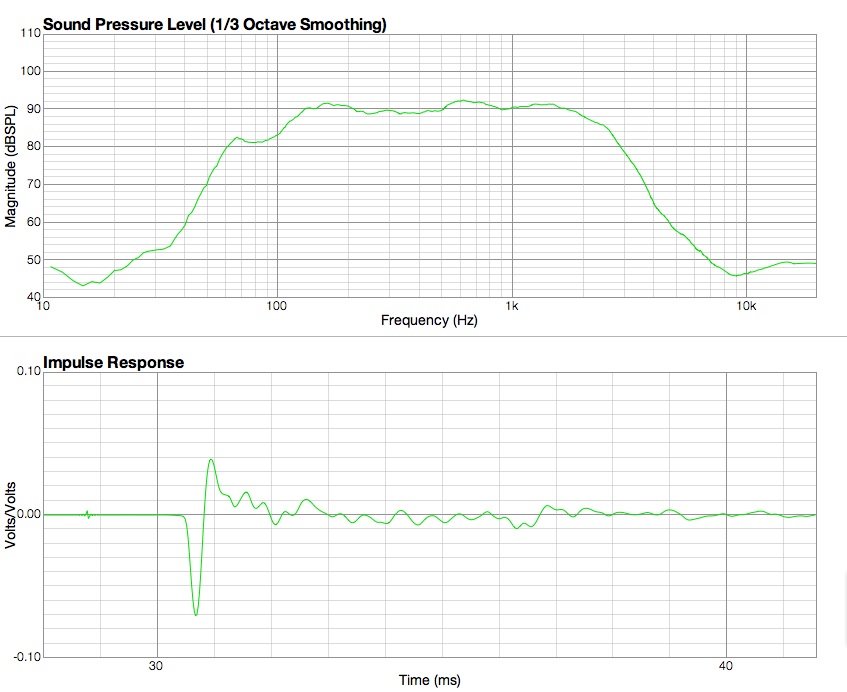
Fig.
01: grafici della risposta in frequenza e della risposta all'impulso di
un woofer
I due grafici sono uno la
trasformazione matematica dell'altro.
L'analisi dei sistemi in regime impulsivo è un ottimo metodo per capire
il funzionamento dei sistemi sotto indagine.
Faceva notare Bartolomeo Aloia (in Costruire HiFi Num. 145, pag. 9) che
ciò è talmente risaputo che la fotocopia dei
grafici originali (sono abbastanza sicuro che si riferisse a quello di
Fig 02, tratto da AES Journal, Dicembre 1972, “Closed-box
loudspeaker systems” e quello di Fig 03, tratto da AES Journal,
Giugno 1973, “Vented Box loudspeaker systems” di R.H. Small
) è stata riproposta decine di volte senza che nessuno, o meglio
quasi nessuno, si prendesse la briga di fare uno straccio di
esperimento, che è per altro decisamente semplice da condurre.
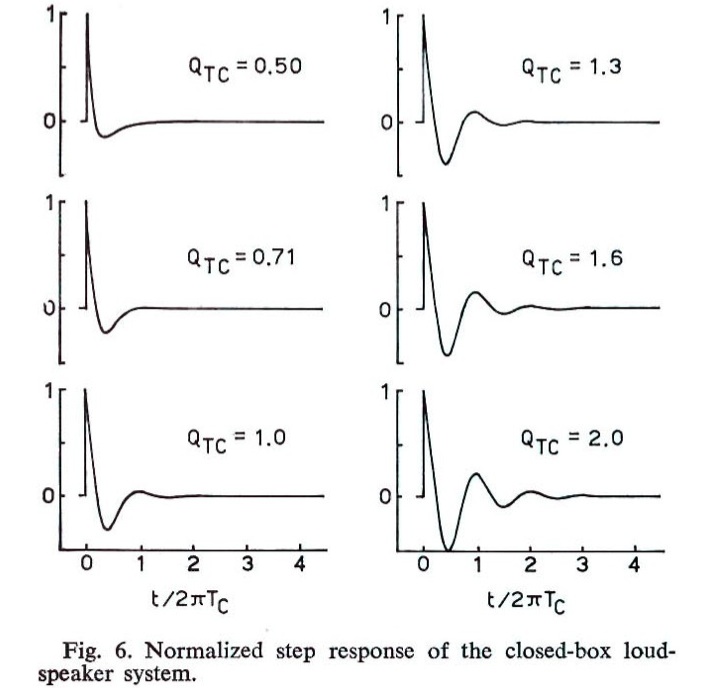
Fig. 02: Risposta
all'impulso di un altoparlante in cassa chiusa (AES
Journal, Dicembre 1972, “Closed-box loudspeaker systems”, R.H. Small)
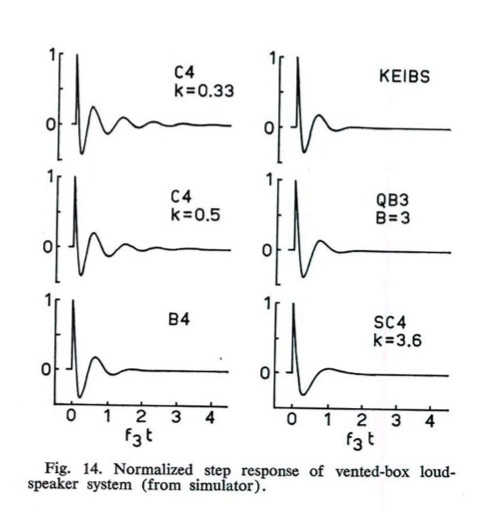
Fig.
03: Risposta all'impulso di un altoparlante in sistema Bass-Reflex (AES Journal, Giugno 1973, “Vented Box
loudspeaker systems”, R.H. Small)
Per
giunta quei grafici non derivano da una misura: al pari del grafico
della risposta in frequenza al variare del fattore di merito, derivano
da una simulazione al computer (1).
Devo ammettere che anch'io ho citato quei grafici, in una pubblicazione
divulgativa, per risparmiare tempo.
Però spesso non mi accontento delle simulazioni; intendiamoci, i
simulatori sono uno strumento indispensabile per la progettazione, sia
elettronica che acustica: senza Spice per progettare un circuito
elettronico si dovrebbero fare un sacco di calcoli e spendere un sacco
di tempo nel test e messa a punto, senza BASS-PC o AFW si dovrebbe....
costruire un prototipo in falegnameria e misurare.
Quindi
ho deciso di misurare la risposta di un altoparlante in regime
impulsivo, perché io mi fido dei simulatori, e proprio
perché so che in genere funzionano ma sono basati su
approssimazioni e modelli, voglio capire bene quanto mi debbo fidare.
Il segnale e l'apparato
sperimentale.
Un impulso dal punto di vista teorico è la Funzione δ
(Delta) di Dirac, un segnale di ampiezza infinita, durata nulla che
contiene tutte le frequenze.
È fisicamente non realizzabile, ma dato che deve pilotare un
altoparlante che è un oggetto fisico, che come tale ha una
risonanza propria, è abbastanza facile trovare una buona
approssimazione di un impulso ideale.
Inoltre per questa misurazione, come sempre, non deve essere necessaria
l'attrezzatura della NASA, sia perché non me la posso
permettere, sia perché non dovendo rilevare l'undicesimo
decimale della costante di gravitazione universale anche una
attrezzatura più abbordabile, se usata in modo appropriato,
può dare indicazioni significative.
L'altoparlante scelto per la prova è il Ciare CS160, un doppia bobina
che ho già usato in altre misure.
In realtà qualsiasi altoparlante va bene, il CS160 va
particolarmente bene perché ha un Qt di 0,55 (misurato) con le
due bobine in serie e 0,99 (misurato) con una sola bobina quindi si
presta a misure con Qt variabile senza troppe acrobazie.
Dulcis in fundo, sta lì sullo scaffale in attesa di essere utilizzato.
La risonanza del CS160 sta a circa 62 Hz, quindi il periodo intrinseco
delle sue oscillazioni è di circa 16 ms.
Perché questa considerazione: perché l'altoparlante
è un sistema oscillante, pertanto sottoposto ad una
sollecitazione impulsiva si muove con tempi propri che dipendono dal
suo periodo intrinseco.
Devo trovare una buona approssimazione di un impulso ideale, quindi
devo produrre un segnale simil-impulso la cui durata sia trascurabile
rispetto al periodo intrinseco dell'altoparlante.
In elettronica “trascurabile” significa concretamente:
“differente per un ordine di grandezza”, quindi in questo
caso la durata del segnale deve essere minore di 1,6 ms.
Per essere rilevabile all'oscilloscopio senza troppe acrobazie deve
essere un segnale periodico, il cui periodo sia tale da consentire
all'equipaggio mobile dell'altoparlante di tornare a riposo dopo
l'oscillazione stimolata dall'impulso.
La soluzione è un'onda quadra a 5 Hz differenziata con un
semplice filtro passa alto RC con un condensatore da 47 nF ed una
resistenza da circa 6 kohm.
All'uscita del filtro troviamo un segnale che sale in un tempo
trascurabile ed entro 1 ms è tornato a circa il 10% del valore
di cresta.
Il filtro è in ingresso all'amplificatore da laboratorio che alimenta
l'altoparlante.
Il movimento del cono viene rilevato con un semplice sensore ottico, lo
stesso usato per rilevare la risposta dell'altoparlante ad un burst di
onde sinusoidali (Interazioni, su
questo sito).
È stato perfezionato con l'aggiunta di un buffer ed inscatolato
per ridurre il rumore captato dal cavo, rumore che negli oscillogrammi
dell'articolo "Interazioni" appare come una oscillazione residua nella
zona di “silenzio” del burst.
La scelta del sensore ottico è dovuta al fatto che un microfono
capterebbe tutte le riflessioni dell'ambiente, che sarebbero a circa 6
ms dall'impulso.
L'apparato di misura, in Fig 04, a parte il perfezionamento del
sensore, è lo stesso dell'articolo "Interazioni", anche
l'altoparlante è lo stesso.

Fig. 04:
L'apparato sperimentale
Altoparlante
in aria.
La prima serie di misure riguarda l'altoparlante in aria libera, che
dal punto di vista concettuale è equivalente ad un altoparlante
in box chiuso con Qts
variabile, in quanto l'aria contenuta nel box contribuisce in prima
approssimazione ad irrigidire la sospensione dell'altoparlante ma non
modifica la struttura del sistema risonante.
La presenza del box contribuisce anche a modificare l'”air load”
del cono, e di conseguenza la massa mobile effettiva, ma nemmeno questo
cambia la struttura del sistema risonante, che rimane un oscillatore
semplice formato da una massa ed una forza elastica.
Misurare la risposta all'impulso di un altoparlante con Qt variabile
è facile, basta collegare in serie all'altoparlante una
resistenza di valore opportuno e si ottiene qualsiasi valore di Qt
maggiore di quello intrinseco dell'altoparlante.
Ho effettuato varie misure con le seguenti resistenze in serie, cui
corrispondono i Qt:
Altoparlante con le bobine in serie (Qt base 0,55):
0 ohm Qt = 0,55
1 ohm Qt = 0,7
2,7 ohm Qt = 1
4,7 ohm Qt = 1,26
8,2 ohm Qt = 1,5
Altoparlante con una bobina (Qt base 0,99):
8,2 ohm Qt = 1,76
Nelle Figure da 04 a 09 si vedono gli oscillogrammi che mostrano lo
spostamento del cono (traccia gialla) in corrispondenza all'impulso
(traccia rossa).
L'impulso rilevato è in entrata all'amplificatore, non ai capi
dell'altoparlante.
L'ampiezza
dell'impulso varia in modo che l'ampiezza dello spostamento iniziale
del cono sia sempre la stessa: la presenza della resistenza in serie
all'altoparlante, per variare il Qt, rende necessario variare il
segnale in ingresso per compensare la potenza persa nella resistenza e
rendere confrontabili gli spostamenti del cono nelle diverse condizioni.
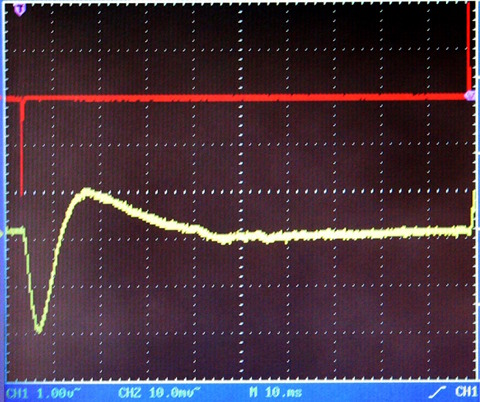
Fig. 05: Qt = 0,55
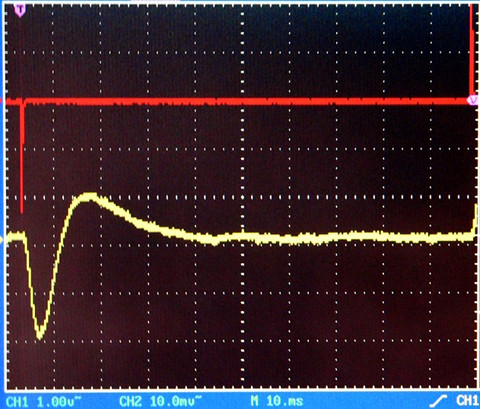
Fig. 06: Qt = 0,7
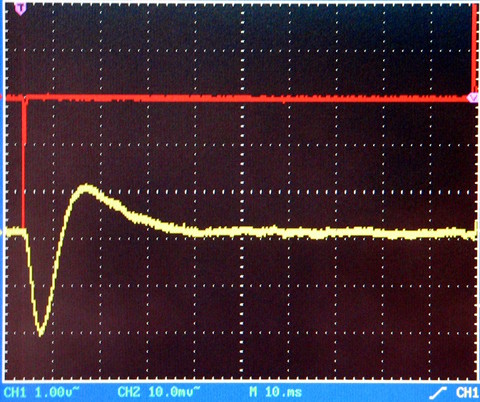
Fig. 07: Qt = 1
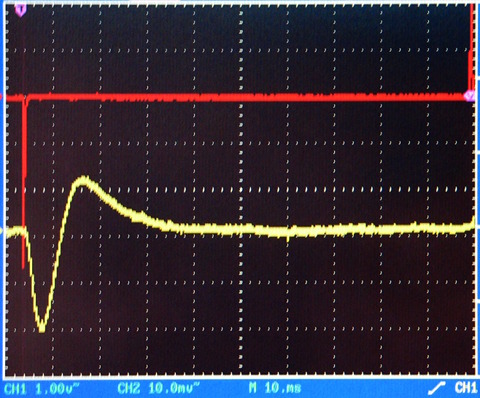
Fig. 08: Qt = 1,26
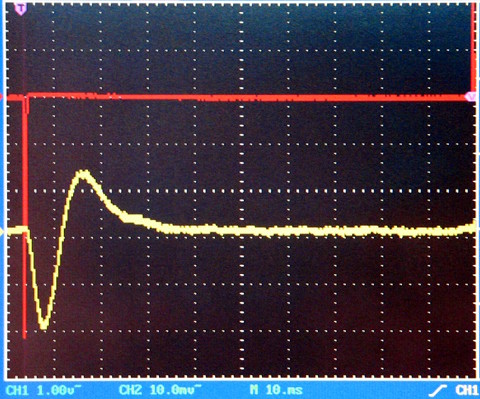
Fig. 09: Qt = 1,5

Fig.
10: Qt = 1,76
Che cosa si nota:
Gli impulsi sono alternati, positivo e negativo, essendo ricavati dalla
differenziazione di un'onda quadra, e quindi corrispondono ai fronti
d'onda in discesa ed in salita.
La durata dell'impulso è effettivamente trascurabile rispetto al
movimento del cono, quindi il movimento del cono non è
influenzato dal segnale elettrico (se mai il segnale elettrico viene
influenzato dalla Back-EMF).
La distanza degli impulsi è tale che non esiste più
movimento del cono rilevabile quando arriva l'impulso successivo (la
base di tempi è 10 ms per divisione).
Ovviamente l'equipaggio mobile ha una massa, quindi una inerzia e
pertanto non si muove con velocità infinita, come succederebbe
ad un cono di inerzia nulla sollecitato da un impulso ideale.
Si muove con velocità finita e, aspetto più importante,
essendo libero da sollecitazione, si muove con un moto che è
essenzialmente sinusoidale smorzato.
Ovvio, trattandosi di un sistema elastico smorzato: sistema elastico in
quanto il cono ha una massa e la sospensione una forza elastica,
smorzato in quanto ci sono gli attriti meccanici e si muove in aria.
Il Qt rappresenta infatti lo smorzamento dovuto a tutti questi fattori.
Dato che il Qt è maggiore di 0,5 si innesca comunque
l'oscillazione, come è chiaro dall'elongazione positiva che
segue lo spostamento iniziale negativo.
Tutto come previsto dalla teoria dei sistemi oscillanti smorzati.
La distanza fra il picco negativo ed il picco positivo (un semiperiodo)
è di circa (valutabile solo con approssimazione) 8 ms, che
corrisponde ad una frequenza compresa fra 60 e 65 Hz, giusto la
frequenza di risonanza del CS160, ed anche questo è in accordo
con la teoria.
L'ampiezza del picco positivo, quello corrispondente alla oscillazione
spontanea del cono in assenza di segnale, cresce con il Qt
dell'altoparlante, cioè ad un minore smorzamento corrisponde una
maggiore ampiezza delle oscillazioni innescate dall'impulso.
Per Qt maggiori di 1,5 l'oscillazione spontanea comincia a diventare
significativa, appena percettibile in Fig.09 e vistosa in Fig.010.
Direi che c'è un buon accordo fra il dato sperimentale e la
previsione teorica di fig. 02; il fatto che Fig.02 rappresenti in
realtà la simulazione di una risposta ad un gradino
anziché ad un impulso non cambia la sostanza.
Altoparlante con carico
reflex.
Dopo la verifica in aria libera, il passo obbligato è vedere
cosa succede se il carico dell'altoparlante è di tipo reflex.
Ho quindi realizzato un accordo reflex variabile, con un box da 30
litri che uso per effettuare misure sugli altoparlanti in box di volume
ridotto (ad esempio la misura del Vas effettuata misurando la Fs in
aria ed in box di volume noto), variando il volume interno mediante
alcuni mattoncini di polistirolo a pori chiusi di volume noto, fissati
con biadesivo.
Ho calcolato con BASS-PC un accordo QB3N4 (il QB3N1 non è possibile con
un Qt di 0,55) ed un accordo B4.
Il QB3N4 dà 20 litri accordati a 48 Hz con un tubo da 58 mm lungo 130
mm.
Il B4 dà 28 litri accordati a 46 Hz con un tubo da 58 mm lungo 85 mm.
Ho quindi realizzato un pannello con il foro per l'altoparlante ed il
tubo di lunghezza variabile, ottenuto con un tubo a sezioni giuntate
con robusto nastro adesivo di tela.
Per la misura sul comportamento impulsivo del sistema reflex bisogna
fare una premessa: il sensore ottico rileva solo lo spostamento del
cono, e non tiene conto pertanto del contributo del condotto, che non
è assolutamente trascurabile.
D'altra parte il contributo del condotto potrebbe essere rilevato solo
da una misura acustica, che dovrebbe essere effettuata in camera
anecoica (2).
Questo aspetto merita qualche ulteriore indagine che dovrà
essere condotta con mezzi diversi, però presumo che il
contributo del condotto possa essere di tipo additivo, non sottrattivo:
il significato di questa considerazione è chiaro esaminando gli
oscillogrammi dello spostamento del cono.
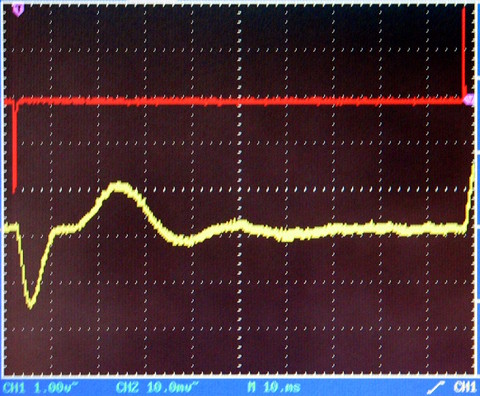
Fig. 11: Risposta
all'impulso di un reflex QB3N4
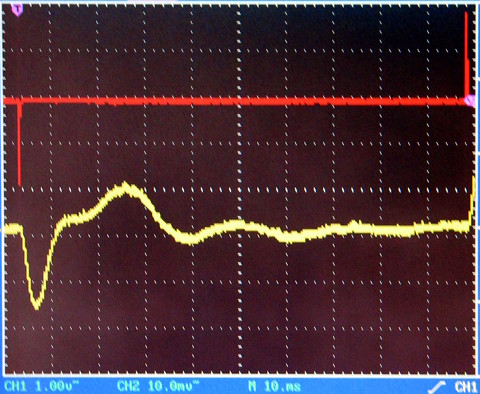
Fig.
12: Risposta all'impulso di un reflex B4
Dagli oscillogrammi di Fig. 11 (QB3N4) e Fig. 12 (B4) appare evidente
che il movimento del cono è notevolmente diverso da quello del
cono in aria.
Appare che c'è un sostanziale accordo con la simulazione di Fig
03, e la differenza potrebbe essere dovuta al contributo del condotto
(la simulazione di Fig 03 tiene conto di tutto il flusso in uscita dal
box, indipendentemente da quale apertura provenga).
La prima osservazione è che il cono si muove per un tempo molto più
lungo dopo la cessazione dello stimolo.
La seconda osservazione è che il moto del cono non è
semplicemente oscillatorio: dopo la semionda negativa iniziale, con
caratteristiche analoghe a quelle del cono in aria, appare
esserci uno stop seguito da una seconda oscillazione che, dalla
distanza fra il picco positivo ed il picco negativo (un semiperiodo)
appare essere di frequenza più bassa della Fs dell'altoparlante
e sembra essere abbastanza vicina alla frequenza di accordo del reflex.
Una ipotesi può essere che all'inizio il sistema risonante (il
reflex è sostanzialmente un risuonatore di Helmholtz) influenzi
il movimento del cono frenando bruscamente l'oscillazione innescata
dall'impulso alla Fs, e successivamente l'aria del condotto in
oscillazione lo muova alla sua
frequenza di risonanza, la Fb.
È solo una ipotesi, da sottoporre ad ulteriori prove sperimentali con
metodi diversi.
Conclusione.
Mentre per l'altoparlante in aria, e quindi con ottima approssimazione
anche in box chiuso, la conclusione è semplice ed è una
conferma sostanziale di quanto già si sapeva, per l'altoparlante
in reflex in realtà non ho una conclusione pronta.
Posso dire che lo strumento più adatto di cui dispongo per
valutare le prestazioni dei sistemi audio, il mio orecchio, mi dice che
il comportamento dei due sistemi è notevolmente diverso,
l'impulso riprodotto dall'altoparlante in aria è decisamente
nitido, molto “secco” e decisamente povero di basse
frequenze, mentre nel caso del reflex il suono è decisamente
più corposo ed “allungato”, ricco di basse frequenze.
Però come ho detto nella premessa, la musica è un'altra
cosa; nessun segnale musicale, nemmeno il suono delle percussioni, si
avvicina se pur lontanamente ad un impulso come quello usato nel test.
In questi test l'altoparlante è sollecitato in un modo in cui
non sarà mai sollecitato nemmeno da un colpo di cassa o di
timpano.
L'indagine sul comportamento dei sistemi reflex deve essere condotta
con metodo necessariamente acustico, e prosegue in "Altoparlanti e Segnali Impulsivi".
(1) Assicuro i più giovani che i computer esistevano e si
usavano comunemente anche in quegli anni, erano un po' più
ingombranti e molto più lenti, ma svolgevano il loro lavoro.
Io mi sono laureato proprio in quel periodo e nella mia tesi ho usato
calcoli svolti al computer.
(2) In realtà ci può essere un altro metodo per rilevare
la risposta a bassa frequenza di un sistema reflex tenendo conto anche
del contributo del condotto, ed è la misura della pressione
acustica eseguita all'interno del box, quindi sottoposta a doppia
differenziazione e opportuno filtraggio, come descritto da R.H. Small
in “Simplified Loudspeaker Measurements at Low
Frequencies”, AES Convention Ottobre 1971.
La tecnica è però complessa e richiede una attrezzatura
apposita calibrata in funzione del box; il tutto è ovviamente
più semplice e più abbordabile di una camera anecoica
adatta a rilevazioni a frequenze inferiori a un centinaio di Hz.
D'altra parte anche una misura a frequenze così basse in camera
anecoica richiede una accurata calibrazione.
In futuro, forse.
|
|
 |
|
