|
Analogie Dinamiche
La
modellizzazione di sistemi meccanici ed acustici mediante un formalismo
elettronico
In
tutti i simulatori per diffusori si usano modelli matematici per
rappresentare le variabili fisiche in gioco: in questi modelli le
grandezze fisiche appartenenti al regno della meccanica e
dell'acustica, cioè la massa mobile del cono, l'aria contenuta
nel box, la forza elastica della sospensione ecc. vengono
“disinvoltamente” rappresentate con simboli che
rappresentano grandezze elettriche, e vengono trattate con le tecniche
matematiche tipiche dei circuiti elettrici.
Perché dico “disinvoltamente”? perché in
genere nei manuali dei simulatori, nei quali questi modelli vengono
presentati, si sorvola su una questione fondamentale: perché
è lecito rappresentare l'aria contenuta in un box mediante un
condensatore e l'aria contenuta in un condotto con una induttanza?
perché sono differenti, se sempre di aria si tratta?
E poi, altrettanto importante: è questo l'unico modo di rappresentare
queste grandezze?
Tutt'al più nella bibliografia si citano i soliti Beranek e
Novak, e quando l'autore è in vena di modernismo Thomas e Rosa.
Ora, se questo può essere sufficiente in un manuale tecnico di
un prodotto superprofessionale destinato a supertecnici, in quanto
dovrebbe essere scontato che i suddetti supertecnici conoscano a
menadito l'elettrodinamica, la meccanica e l'acustica (tutte e tre a
fondo, e tutte le loro interazioni), oppure è lecito che in un
articolo pubblicato sull'AES Journal nel 1970 si citi in bibliografia
un testo del 1960, a mio parere ciò non è adeguato in
manuali destinati a hobbisti o poco più (un prodotto venduto su
internet a pochi euro è per definizione destinato ad utenti non
professionali).
Il problema è tecnicamente conosciuto come problema delle “Analogie
dinamiche”.
Analogie
come analizzare qualche cosa fingendo
che sia qualche cosa d'altro
In
ingegneria si parla di “Analogie” quando si descrive un
sistema mediante modelli e metodi derivati da un sistema fisicamente
diverso, da qui il sottotitolo.
E' ovvio che l'analogia deve essere giustificabile, cioè deve
essere logicamente coerente, matematicamente e fisicamente
corretta e fornire risultati in accordo con il dato sperimentale.
L'obiettivo di queste note è di cercare di spiegare prima e
giustificare poi le analogie, non tanto dal punto di vista puramente
matematico ma dal punto di vista fisico, facendo ricorso più
all'intuizione che alla matematica.
Quindi giungere a spiegare come funzionano i modelli usati nei
simulatori e quale è il loro significato al di là del
formalismo matematico.
Obiettivo molto ambizioso, debbo ammetterlo; è mia convinzione
che per usare bene un simulatore si debbano avere ben chiari i principi
fisici su cui è basato e soprattutto i limiti dei modelli
utilizzati.
Altrimenti, soprattutto nel caso dei simulatori di diffusori,
c'è il rischio di aver buttato sia i soldi del simulatore
(pochi) che i soldi dei componenti (molti), senza rendersi conto che
ciò che esce dal simulatore è solo il punto di partenza,
non il punto di arrivo del progetto.
1.
Perché le analogie si usano e sono necessarie?
Fondamentalmente le analogie
si usano per due ragioni:
- per
un sistema è stato sviluppato un formalismo più efficace
e più approfondito, soprattutto dal punto di vista dei metodi
applicativi, che per un altro
- un sistema è
misto, cioè composto da componenti di natura diversa, e per
descriverne il comportamento complessivo si deve unificare il
modello, costruire un modello complessivo che rappresenti
grandezze di natura diversa
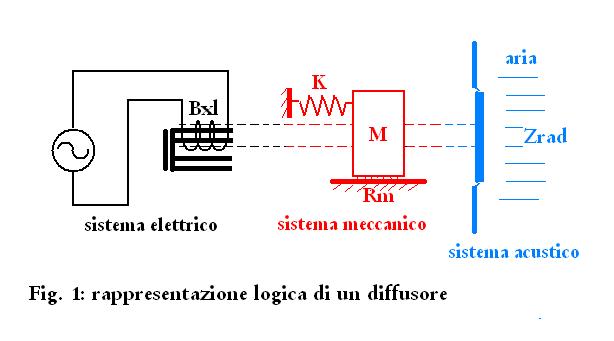
Il diffusore acustico
è un sistema complesso elettrico-meccanico-acustico, che riceve
un segnale elettrico, lo trasforma in forze meccaniche che vengono a
loro volta trasformate in pressione acustica.
Nel diffusore diversi
elementi elettrici, meccanici ed acustici coesistono e soprattutto si
influenzano a vicenda, e si vuole essere in grado di capire
(cioè predire):
- la pressione acustica
generata in funzione del segnale elettrico (la curva di risposta)
- la reazione del
diffusore al segnale (l'impedenza elettrica risultante)
- i limiti di utilizzo
(l'escursione del cono).
Quello che si vede in Fig. 1
non è un modello utilizzabile tecnicamente, è solo una
rappresentazione intuitiva della trasformazione di energia da una forma
ad un'altra.
Quando si parla di
“modello” si intende un sistema di grandezze quantificate e
le cui leggi di funzionamento siano ben definite, un modello serve a
fare calcoli e previsioni quantificate.
I modelli usati in questo
campo sono modelli “a costanti concentrate” per non
avere un modello comunque troppo complesso per essere trattato, e
ciò implica alcune assunzioni e molte semplificazioni che ne
limitano la validità ad un ambito ristretto e ben definito.
Un modello a costanti
distribuite che comprendesse grandezze elettriche, meccaniche ed
acustiche credo sarebbe un oggetto mostruoso, se mai fosse possibile
costruirlo; comunque qualsiasi modello, per lo stesso fatto di essere
un modello, richiede semplificazioni ed approssimazioni,
Il
“riduzionismo” conseguente non è gratis, quindi
capire bene cosa sta “sotto” un modello semplice, come
quelli che vengono comunemente usati nei sistemi di simulazione,
è importante sia per capire come funziona sia per capire fino a
dove funziona.
2.
Un po' di basi
Partiamo dall'analizzare
gli elementi semplici che costituiscono un diffusore, per riassumerne i
principi di funzionamento e focalizzare l'attenzione su tutto
ciò che attiene alla modellizzazione; passeremo poi ad
analizzare le “analogie” possibili dei costituenti
elementari, per capire poi come utilizzarli per modellare i sistemi.
L'altoparlante
Cominciamo da un breve riepilogo sull'altoparlante: già visto mille
volte, tanto per fissare i termini.
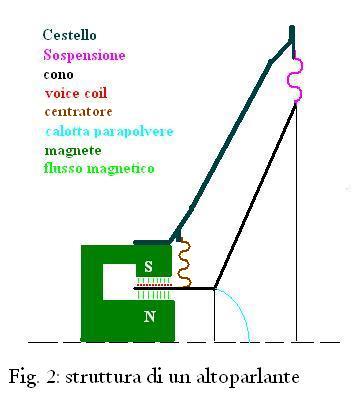 L'altoparlante è un sistema
elettromeccanico, composto da una parte elettromagnetica: magnete e
voice coil, e da una parte meccanica: cono, supporto della voice coil,
sospensione e centratore. L'altoparlante è un sistema
elettromeccanico, composto da una parte elettromagnetica: magnete e
voice coil, e da una parte meccanica: cono, supporto della voice coil,
sospensione e centratore.
Tralascio il cestello perché non ha alcuna funzione se non quella di
tenere assieme il tutto.
La
voice coil ed il magnete costituiscono il “motore” del sistema, quella
parte che trasforma il segnale elettrico (la corrente alternata che
proviene dall'amplificatore) in un movimento meccanico.
Il cono,
che è rigidamente (idealmente) collegato alla voice coil, funziona da
pistone per trasmettere il movimento meccanico all'aria.
Il cono: un sistema
meccanico oscillante
La parte meccanica mobile
dell'altoparlante ha una caratteristica: ha una massa, costituita dalla
massa del cono, della voice coil (che è in rame o alluminio) e
del suo supporto (cartone, fibra sintetica, alluminio), dalla massa del
centratore e della sospensione.
Questa massa, che
possiamo in prima
approssimazione considerare un corpo unico rigido, è collegata
all'ambiente (cioè al cestello) da una forza elastica, la
sospensione (in questa astrazione abbiamo separato la sospensione nei
suoi due componenti, la massa e la forza elastica, come se fossero due
parti separate).
L'altoparlante è
quindi un sistema risonante: in Fig 3a abbiamo il modello
semplificato di un sistema massa-molla a riposo.
A rappresenta il fatto che
la molla è fissata ad una estremità in modo rigido, M
è la massa connessa in modo rigido all'altra estremità
della molla, la molla ha la propria costante elastica K, che la
caratterizza completamente, definita in questo modo:
F
= - K * x
1.1 (legge di
Hooke)
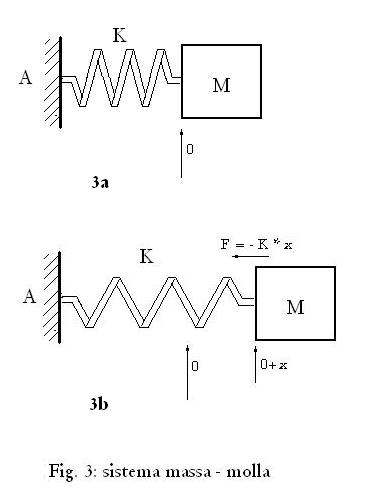
dove x è
l'allungamento della molla, cioè lo spostamento dalla posizione
di riposo, quando viene sottoposta ad una forza F; in altre parole una
molla con costante elastica K
esercita una forza F
proporzionale
all'allungamento x.
Il segno – tiene
conto del fatto che la forza esercitata dalla molla è in verso
contrario allo spostamento e quindi tende a riportare la molla in
posizione di riposo.
La Fig. 3b illustra il
sistema
massa – molla quando viene spostato dalla posizione di riposo
(applicando alla massa una forza -F).
Supponiamo ora un sistema ideale massa – molla:
ideale significa che:
la massa non è sottoposta a
nessuna forza tranne quella della molla
la molla è collegata ad
un “ambiente” A assolutamente rigido (cioè che non
subisca alcuno spostamento quando soggetto ad una forza)
non c'è alcun tipo di
dissipazione, quindi la massa si muova senza attrito
la molla è perfetta,
cioè l'unica legge che governa il suo funzionamento è la
1.1, ed è priva di massa.
In Fig. 4 vediamo
l'evoluzione degli stati del sistema massa – molla, vediamo
cioè che cosa succede quando la massa viene spostata dalla
posizione di riposo, dal momento in cui essa (la massa) viene
rilasciata.
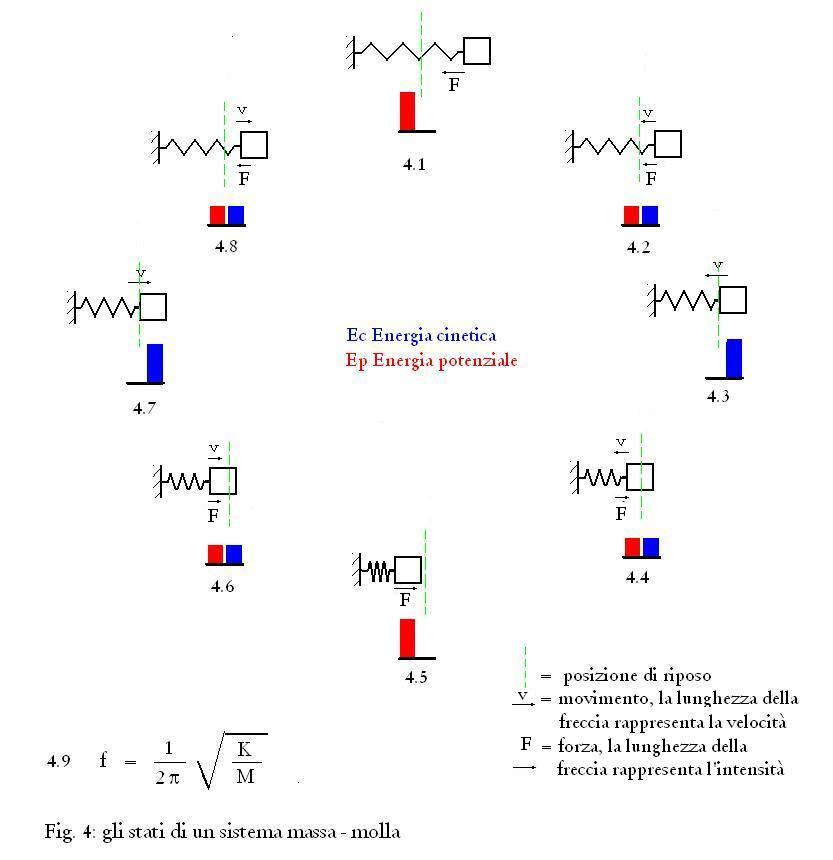
In Fig. 4.1 la massa
viene spostata dalla posizione di riposo da una forza applicata, e
quindi viene liberata; la molla si è caricata e quando viene
liberata, la forza elastica della molla tende a riportare la massa alla
posizione di riposo.
In questo movimento la
massa acquista velocità, mentre la molla si scarica (Fig. 4.2).
In Fig. 4.3 la massa nel
suo movimento giunge alla posizione di riposo;
in questa posizione la forza si annulla (in base alla 1.1) e la massa
in movimento ha raggiunto la sua massima velocità; la massa non
può fermarsi istantaneamente ma prosegue, a causa della sua
inerzia.
Da questo punto la molla
agisce in senso inverso, la forza elastica
è in verso opposto al moto e quindi rallenta la massa fino a
fermarla nella posizione di massima elongazione della molla in verso
opposto (Fig. 4.5).
Da questo momento il
processo si ripete (forza e spostamento sono
opposti alla prima parte del ciclo) e quindi la massa viene riportata
alla posizione di riposo (Fig. 4.7), e così via.
Si genera un movimento oscillatorio regolare la cui frequenza dipende
dalla massa e dalla forza elastica della molla: maggiore è la
massa e più bassa è la frequenza, più forte
è la molla più alta è la frequenza.
E' facilissimo fare un esperimento: prendete un elastico (abbastanza
lungo per vedere meglio l'effetto) ed appendetevi un peso qualsiasi
(sufficiente ad allungare di circa un terzo l'elastico, solo per
rendere l'effetto visibile), un mestolo da cucina oppure una pinza da
meccanico vanno benissimo, quindi tiratelo verso il basso (non troppo)
e lasciatelo andare.
Poi aggiungete un altro peso, un altro mestolo o un'altra pinza e
ripetete l'esperimento: l'oscillazione è più lenta.
Poi potete ricominciare con due elastici (i due elastici in parallelo,
non in serie – la ragione di questa precisazione, che è
ovvia, sarà chiara in seguito), per sperimentare con una molla
più forte.
La chiave di tutto: l'energia
Che cosa succede nel sistema oscillante?
La chiave per capire il fenomeno è l'energia, nelle sue varie forme, ed
il Principio di conservazione dell'Energia.
Succede che il sistema oscillante a riposo ha energia propria nulla;
quando si applica una forza per spostare la massa la molla si carica di
energia, che è energia statica, energia potenziale Ep,
capacità di compiere un lavoro quando siano tolti i vincoli.
Quando si rilascia la
massa questa capacità di compiere un lavoro ha effettivamente la
possibilità di compierlo e muove la massa per riportarla alla
posizione di riposo, la massa in movimento acquista energia di
movimento, energia cinetica Ec, mentre la molla si scarica e quindi
l'energia potenziale diminuisce (da fig 4.1 a 4.3).
Quando la massa arriva
alla posizione di riposo (Fig. 4.3) l'allungamento della molla
è uguale a zero quindi l'energia potenziale è nulla, ma
la massa ha acquistato velocità e quindi energia cinetica: in
questa posizione la molla è in posizione di riposo quindi non
comunica più alcuna forza alla massa, che quindi non aumenta
più la propria velocità (l'accelerazione è nulla,
a=F/M), da questo punto in avanti la molla si oppone al movimento,
rallentando la massa e caricandosi di energia potenziale (Fig. 4.5).
Un principio fondamentale della fisica dice che l'energia totale di un
sistema chiuso (cioè isolato) è costante: nel nostro caso
ideale (mancanza di attriti) si ha una trasformazione fra energia
potenziale ed energia cinetica, tale che la somma delle due forme di
energia è costante.
Nel movimento oscillatorio perfetto si dimostra che il sistema, una
volta eccitato, oscilla con ampiezza costante, con un moto detto
armonico, ad una frequenza costante definita dalla equazione di Fig.
4.9.
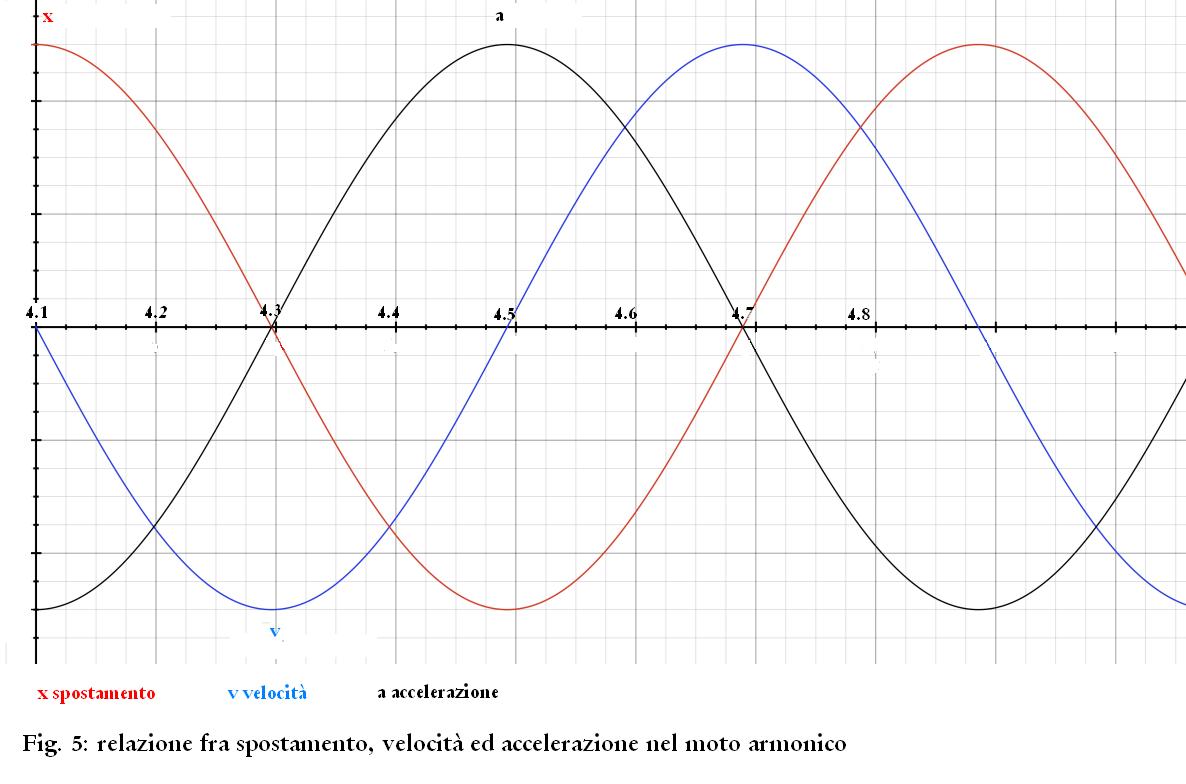
Il movimento del cono nel moto
armonico
Nel moto armonico, fra le grandezze fondamentali del movimento:
- spostamento dalla
posizione di riposo
- velocità
- accelerazione (che è
proporzionale alla forza che agisce sulla massa in movimento: F = M*a)
sussistono le relazioni di Fig. 5, dove i numeri sull'asse orizzontale
corrispondono agli stati di Fig. 4.
Detta A
l'ampiezza del moto, si dimostra che (pi è il p greco) :
in 4.1 x = A
v
= 0
a = -
A * 2pi * f
in 4.3 x = 0
v = -
A * 2pi * f
2.1
a = 0
in 4.5 x = - A
v
= 0
a
= A * 2pi * f
che ci dicono che quando
l'ampiezza dello spostamento è massima l'accelerazione è
massima in verso opposto (la molla manifesta la sua azione
secondo la 1.1) e la velocità è nulla (la massa
inverte il suo moto quindi per un istante è ferma), mentre
quando la massa passa per la posizione di riposo (spostamento = 0) la
velocità è massima e l'accelerazione è nulla (la
molla passa per la posizione di riposo quindi non esercita alcuna
forza).
La forma dell'equazione della velocità, che dipende direttamente
dalla frequenza del moto, è molto importante e deve essere
tenuta a mente per i prossimi sviluppi.
In base alla II legge di Newton la forza esercitata dalla molla è
proporzionale alla accelerazione ed in fase con essa.
Il moto armonico smorzato
Quanto detto fino ad ora vale nel caso di sistema senza attriti, cioè
senza forze dissipative.
Che cosa succede quando
il sistema non è ideale, cioè quando ci sono attriti?
Il principio di conservazione dell'energia è ancora valido, ma
in questo caso gli attriti trasformano ad ogni ciclo una parte
dell'energia disponibile in energia termica, che viene dispersa
nell'ambiente e non è più recuperabile per compiere
lavoro utile.
Pertanto ad ogni ciclo una piccola porzione dell'energia cinetica (e
potenziale) viene persa, l'energia totale dovuta al movimento o alla
posizione diminuisce ed l'oscillazione di conseguenza diminuisce di
ampiezza, fino a cessare del tutto, quando tutta l'energia iniziale
è stata trasformata in calore.
La forza dissipativa ha
le origini più varie, può essere dovuta allo
strisciamento superficiale di due parti meccaniche, al movimento in un
fluido viscoso, ad una deformazione non perfettamente elastica: in una
molla reale la deformazione causa microattriti interni nel materiale di
cui la molla è costituita; la stessa cosa succede quando un
materiale come ad esempio il legno viene sottoposto a vibrazioni.
L'attrito è un fenomeno decisamente complesso, e per descriverlo
in modo ragionevolmente semplice si debbono fare semplificazioni
notevoli.
In genere si assume che per un corpo, in movimento sufficientemente
lento, la forza dissipativa è pari a:
F = - Rm
* v
2.2
dove Rm è detta Resistenza
meccanica e v è la velocità di
spostamento.
Il segno - tiene conto che la forza dissipativa è in verso
opposto al verso del movimento.
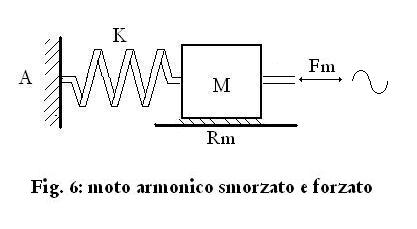
Il moto armonico
smorzato forzato
Per mantenere costante l'oscillazione del nostro sistema molla –
massa in presenza di forze dissipative è necessario fornire in
altro modo al sistema l'energia dissipata sotto forma di calore dagli
attriti.
L'energia dissipata vale:
Ed
= Rm * v ^2
2.3
Dobbiamo quindi agire sulla massa M
con una forza che sia contraria alla forza dissipativa: dato che stiamo
parlando di movimento oscillatorio anche la forza applicata
esternamente deve essere concorde con la forza della molla, quindi deve
essere una forza oscillante, che rappresentiamo come in Fig 6.
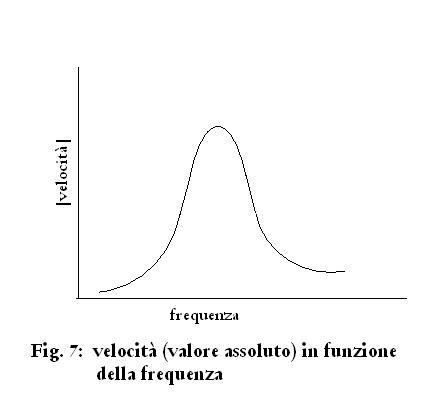
Che cosa succede se
applichiamo una forza oscillante la cui frequenza non coincide con la
frequenza di risonanza?
Quando la frequenza della
forza Fm coincide con la frequenza di risonanza del sistema massa
– molla, l'azione della molla e della forza esterna si
sommano e il moto oscillatorio raggiunge la sua massima ampiezza.
Quando la frequenza della
forza Fm non coincide con la frequenza di risonanza del sistema le
azioni delle due forze non si sommano più ad ogni istante,
bensì in qualche istante si sommano ed in qualche altro istante
si contrastano, quindi il moto oscillatorio diminuisce di ampiezza e
viene tenuto attivo solo dalla forza esterna Fm.
La velocità di
movimento della massa M si comporta come in Fig. 7 (vedremo in
seguito perché focalizzo l'attenzione sulla velocità).
L'ambiente: l'aria
L'altoparlante suona perché è immerso nell'aria, che è un fluido
comprimibile.
L'aria è un gas, quindi composto da particelle (ossigeno, azoto
e altre molecole di natura varia in percentuale minore ma oggigiorno
crescente, pulviscolo ecc) in continuo movimento casuale: le particelle
occupano una parte minima dello spazio disponibile, e si muovono
urtandosi fra loro e rimbalzando ed urtando le pareti dell'ambiente in
cui si trovano, venendo respinte da esse, come le palle su un tavolo da
biliardo, come in Fig. 8.
Essendo composta da
particelle l'aria ha una densità ro, cioè una massa
per unità di volume, che in condizioni standard è pari a
1,18 Kg / m3.
Essendo le particelle in
movimento casuale, si urtano fra loro ed urtano le pareti del
recipiente che le contiene; questi urti comunicano una forza alle
pareti stesse: si dice che il gas ha una pressione P, una forza
per unità di superficie, cioè l'aria esercita una forza
sui corpi immersi in essa e sulle pareti dell'ambiente in cui è
contenuta; la pressione normale dell'aria in cui viviamo è pari
a circa 1 Kg / cm2.
La pressione è dovuta
all'energia termica contenuta nell'aria: è l'energia termica che
tiene in movimento le particelle (ovvero: l'energia è il
movimento delle particelle).
In condizioni statiche il
movimento netto delle particelle è nullo, per ogni particella
che si muove in una direzione un'altra si muove in direzione opposta,
poi le particelle si urtano e rimbalzano cambiando direzione: dal punto
di vista macroscopico l'aria è ferma e statisticamente le
particelle sono in equilibrio.
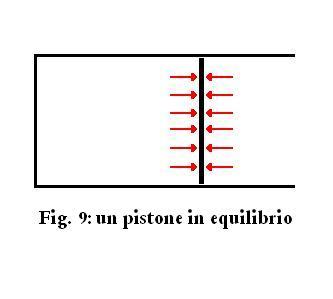
Supponiamo che l'ambiente
che contiene l'aria abbia una parete mobile, un pistone come in Fig. 9:
essendo il sistema immerso nell'aria esterna la pressione esterna
equilibra quella interna, la forza esercitata dalla pressione dell'aria
sulla parete interna del pistone eguaglia la forza esercitata dall'aria
esterna sulla parete esterna del pistone ed il pistone è fermo.
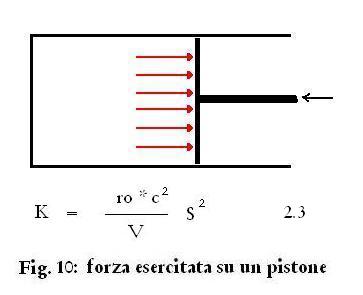
Se si esercita una forza
aggiuntiva sul pistone, come in Fig. 10, il pistone si sposta, il
volume interno diminuisce quindi la pressione aumenta fino a che la
forza generata dalla pressione interna eguaglia la forza generata dalla
pressione dell'aria esterna più la forza aggiuntiva (i sistemi
fisici tendono sempre all'equilibrio).
L'aria contenuta nella
cavità si comporta come una molla (per piccoli spostamenti del
pistone), come ci dice la 2.3 che definisce la Costante
elastica dell'aria contenuta nella cavità, dove V è il
volume della cavità, S la superficie del pistone, ro la
densità dell'aria e c la velocità del suono.
Prima divagazione
Facciamo ora un piccolo esercizio sul sistema di Fig. 9 e 10.
In un gas perfetto vale la legge:
P * V = costante *
T
2.4
dove T è la temperatura del gas e la costante dipende in linea di
massima dalla densità del gas.
Questo vale anche per il gas contenuto nel sistema di Fig. 9 e 10, il
gas ha pressione P, il volume della cavità è V, la
superficie del pistone è S, il pistone si muove senza attrito e
senza trafilamento d'aria (e cominciamo a semplificare).
Cosa succede se spingiamo il pistone, variando il volume V di una
quantità dV?
Dato che siamo in vena di semplificazioni, diciamo che se spostiamo di
poco il pistone la temperatura T non varia in modo significativo,
diciamo anzi che non varia proprio.
D'altra parte nel sistema a riposo la pressione esterna e quella
interna sono uguali, se spostiamo il pistone la pressione interna varia
e si assume che quella esterna rimanga costante, quello che è
rilevante quindi è la variazione di pressione, che
chiamiamo dP.
Dato che P * V = costante possiamo scrivere:
P * V =
( P + dP ) * ( V + dV )
2.5
Con due banali passaggi arriviamo a:
P * dV =
V * dP - dP * dV
2.6
Dato che abbiamo assunto che dV sia piccolo, anche dP sarà
piccolo quindi il termine dV * dP è trascurabile, da cui:
dP =
P * dV / V
2.7
ma la pressione è una forza su una superficie, quindi
la 2.7 ci permette di calcolare la forza necessaria per
spostare il pistone di una distanza qualsiasi (purché piccola).
Mettiamoci un po' di numeri:
Diciamo che V è 91 litri, il diametro del pistone è 26 cm
e lo spostamento è 3 mm (questi numeri non sono affatto casuali).
Il diametro di 26 cm corrisponde ad una superficie di 530 cm2, quindi
lo spostamento di 3 mm corrisponde ad una variazione di volume di 159
cm3, che rispetto al volume di 91 litri equivale a 0,00175 * V:
possiamo sicuramente considerare piccolo lo spostamento e quindi le
semplificazioni fatte sono accettabili.
In base alla 2.7, dP vale circa 0,00175 Kg / cm2 che,
su una superficie di 530 cm2 dà una forza pari a circa 0,92 Kg.
Prima considerazione:
la variazione di volume risulta inferiore allo 0,2 %
pertanto la non linearità introdotta dalla forma
iperbolica della 2.4 è del tutto trascurabile.
Quindi la forza
sviluppata dal gas è con ottima approssimazione lineare e
corrispondente alla legge
F = - K * x.
Seconda considerazione:
i numeri utilizzati nell'esempio non sono casuali, corrispondono ad
alcuni parametri meccanici del woofer Ciare PW328, quella
descritta nell'esempio è la definizione del Vas, che nel PW328
è appunto 91 litri; il Vas è la definizione della
costante elastica delle sospensioni dell'altoparlante (il Vas si
definisce come il volume di aria che ha una cedevolezza uguale alla
cedevolezza delle sospensioni, per una superficie pari alla superficie
proiettata del cono; ricordo che la cedevolezza è semplicemente
l'inverso della costante elastica).
Seconda divagazione
Ora che abbiamo capito che l'aria contenuta in una cavità si
comporta (con alcune approssimazioni) come una molla, consideriamo il
sistema di figura 11.
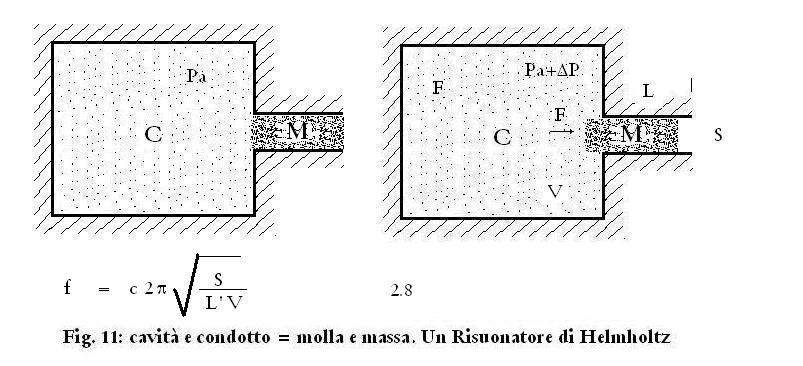
Abbiamo una cavità C di volume V con un condotto di superficie S
e lunghezza L che comunica con l'esterno.
L'aria contenuta nel condotto ha una sua massa M
= (Volume del condotto) * (densità dell'aria), che
risente dell'azione elastica dell'aria contenuta nella cavità:
quindi anche qui abbiamo un sistema molla – massa, che ha
pertanto una sua frequenza di risonanza: questo è esattamente un
Risuonatore di Helmholtz.
La frequenza di risonanza dipende:
- dal volume del
condotto (che determina la massa dell'aria oscillante), quindi dalla
sua superficie e lunghezza
- dal volume della
cavità, che determina la costante elastica dell'aria contenuta
nella cavità (in base alla 2.3 e alla 2.7.), ovviamente fissate
le condizioni operative, cioè pressione atmosferica e
temperatura.
Per calcolare il sistema meccanico massa – molla avevamo fatto
alcune assunzioni sul sistema massa – molla, che deve
essere ideale.
Quali sono le approssimazioni che accettiamo per impostare un calcolo
sul Risuonatore di Helmholtz?
Considerare il sistema cavità – condotto come un sistema
massa – molla ideale significa adottare un modello “a
costanti concentrate”, in cui:
l'aria contenuta nel condotto si
muove come un corpo rigido e senza attriti:
qui l'approssimazione è veramente rilevante
- l'aria lungo le pareti
del condotto, a causa della viscosità, non si muove alla
velocità dell'aria contenuta nel centro del condotto. Pertanto
il condotto deve avere una sezione abbastanza grande da permetterci di
trascurare l'effetto superficie del condotto e comunque una forma non
“estrema”, in quanto una “tagliatella” di 1 x
200 cm, pur avendo una superficie totale di 200 cm2 in pratica ha solo
effetto superficie
- la pressione deve
essere uniforme lungo il condotto (corpo rigido significa non
comprimibile) quindi il condotto deve essere abbastanza corto da poter
trascurare le differenze di pressione lungo il condotto
- l'aria alle due
estremità del condotto appartiene al condotto, ed
appartiene anche sia alla cavità (ad una
estremità) che all'ambiente esterno (all'altra), inoltre
il suo comportamento dipende da come sono realizzati i bordi del
condotto (a spigolo vivo, smussati con profilo circolare piuttosto che
iperbolico o esponenziale ecc), quindi definire il volume del condotto
non è semplice. Una approssimazione che per forme del condotto
regolari risulta sperimentalmente abbastanza valida è che la
lunghezza del condotto viene aumentata di una quantità pari
a 0,85 * (diametro
del condotto) : per questo motivo nella 2.8 compare L' al posto
di L.
non si considera la massa dell'aria
contenuta nella cavità
anche questa approssimazione è significativa:
- mentre nel caso di un
sistema meccanico è ragionevole che la massa della molla sia
trascurabile rispetto alla massa oscillante, in questo caso la massa
d'aria contenuta nella cavità è molto maggiore della
massa dell'aria del condotto, e può essere trascurata solo se la
pressione è uniforme all'interno della cavità: in altre
parole la lunghezza d'onda deve essere molto maggiore di tutte le
dimensioni della cavità.
- La cavità deve quindi
avere una forma “regolare”, il calcolo per una canna d'organo è diverso.
la forza elastica dell'aria nella cavità è
lineare
ciò è vero solo per ampiezza dell'oscillazione ridotta,
questo è per altro richiesto anche per poter considerare l'aria
nel condotto come un corpo rigido.
Le pareti della cavità sono
assolutamente rigide
ciò significa che non si muovono sotto l'azione della forza
elastica dell'aria contenuta; nel caso di pareti reali di materiale
reale il movimento delle pareti implica dissipazione dell'energia
comunicata dalla forza elastica.
Come si vede le
approssimazioni che siamo costretti ad introdurre per poter costruire
un modello ragionevolmente semplice del sistema meccanico –
acustico sono molto più significative che nel modello puramente
meccanico: è entrata in gioco anche la lunghezza d'onda, e
questa è una approssimazione che influisce pesantemente in tutti
i sistemi acustici.
E' chiaro che stiamo parlando di modelli “a costanti
concentrate”, che sono applicabili solo quando la distribuzione
dell'energia è uniforme, cioè quando le dimensioni
fisiche del sistema (nel nostro caso tutte le dimensioni, sia della
cavità che del condotto) sono molto minori della lunghezza
d'onda del suono che viene trattato.
Il suono
In un diffusore acustico Il suono si genera perché lo
spostamento del cono generato dalla corrente che scorre nella voice
coil rompe l'equilibrio fra pressione interna e pressione esterna (o,
generalizzando, fra la faccia anteriore e quella posteriore),
comunicando una spinta in una direzione precisa alle particelle che
urtano la superficie del cono, le quali a loro volta comunicano questa
spinta alle particelle contro cui rimbalzano, e così via: si ha
pertanto un aumento locale di pressione in quanto viene aggiunta
energia cinetica alle particelle di gas colpite dal movimento del cono.
Dato che le particelle sono molto piccole e mediamente molto lontane
fra loro la trasmissione del moto fra le particelle non è
istantanea, l'onda di pressione che viene trasmessa all'ambiente
circostante si sposta con una velocità finita, che dipende dalla
densità dell'aria (in prima approssimazione).
Ovviamente l'aria si oppone al movimento del cono (principio di azione
e reazione).
Il cono si muove di moto alternato, quindi si ha una successione di
compressione e rarefazione che si propaga nell'ambiente, come in Fig.
12.
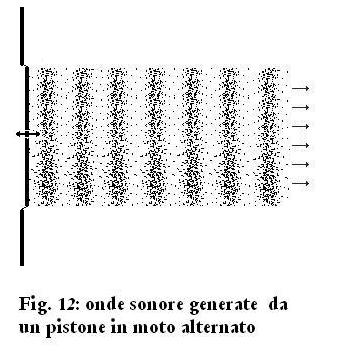 Nella figura 12 abbiamo fatto una
ulteriore approssimazione: il cono si comporta come un pistone piatto. Nella figura 12 abbiamo fatto una
ulteriore approssimazione: il cono si comporta come un pistone piatto.
Ma ciò è vero solo quando le dimensioni del cono sono
trascurabili rispetto alla lunghezza d'onda; in effetti quando nella
letteratura tecnica si parla di “superficie del cono” si
intende sempre “superficie proiettata”, come se al posto
del cono ci fosse un pistone piatto.
Il livello del suono prodotto dipende quindi dalla pressione, e
più esattamente dalla pressione “aggiunta” alla
pressione atmosferica dal movimento del cono; quando parliamo di
“pressione acustica” o genericamente di pressione
intendiamo la differenza di pressione rispetto alla pressione
atmosferica, che indicheremo con Pa.
La pressione è determinata dal movimento caotico delle molecole
di aria, più il movimento è veloce maggiore è la
pressione, la quale in sostanza è causata dall'energia cinetica
delle molecole, pertanto dalla velocità.
In base al meccanismo spiegato sopra è evidente che la pressione
acustica dipende dalla velocità di spostamento del cono, essendo
sostanzialmente un trasferimento di energia cinetica: più il
cono si muove velocemente più energia cinetica trasferisce
all'aria.
Questo dà ragione del fatto che per ottenere una pressione
costante al variare della frequenza, l'ampiezza dello spostamento deve
essere inversamente proporzionale alla frequenza (in base alla 2.1).
come la matematica ci aiuta a
trasformare le mele in pere
Finora abbiamo esaminato
alcuni elementi costitutivi degli altoparlanti, focalizzando
l'attenzione sulla parte meccanica della faccenda: anche quando abbiamo
parlato di acustica, in realtà abbiamo privilegiato l'aspetto
meccanico del fenomeno.
E' vero che l'aspetto
meccanico e quello acustico della trasmissione del suono nell'aria sono
strettamente legati, ma gli oggetti fisici sono corpi rigidi (nel senso
che non sono comprimibili) che nelle approssimazioni fatte non hanno
dimensioni, mentre l'aria, che è un gas, non è un corpo
rigido (nel senso che è comprimibile) e le dimensioni del
sistema acustico non si possono trascurare ma bisogna tenerne conto
nelle approssimazioni.
Abbiamo anche visto quante
approssimazioni sono state necessarie per trattare analiticamente
(cioè matematicamente) i fenomeni: se nel campo della meccanica
le approssimazioni sono tutto sommato abbastanza ovvie e non
“eccessive”, quando si arriva a trattare i fenomeni
meccanici nei gas le approssimazioni sono veramente importanti, tanto
da imporre pesanti limiti all'applicabilità dei modelli
matematici.
Ma l'obiettivo primario
è non solo trovare un modello matematico, cioè le
equazioni che descrivono il funzionamento del sistema, unificato fra
meccanica ed acustica, ma soprattutto trovare un modello matematico che
ci permetta di trattare tutti i fenomeni: meccanici, acustici ed
elettrici, in un modo unico, con le tecniche che conosciamo
meglio e che quindi siamo in grado di trattare con maggiore
disinvoltura: dobbiamo trattare (dal punto di vista del calcolo) tutta
la realtà come se fosse un circuito elettrico.
Dato che si tratta di progettazione è giocoforza introdurre un
po' di matematica in più, ma anche in questa puntata non
esporrò dimostrazioni e derivazioni analitiche delle soluzioni
di equazioni: queste si possono trovare in qualsiasi testo; quello che
mi preme è giungere ad una comprensione intuitiva di ciò
che sta “sotto” la matematica.
So che è un obiettivo ambizioso e decisamente difficile.
E' anche importante capire che spesso sotto la matematica non
c'è null'altro che matematica, ma con quest'artificio siamo in
grado di fare calcoli che funzionano; capire questo è forse
ancora più difficile.
La dissipazione
dell'energia
Cerchiamo di arrivare per gradi
a capire come si può arrivare ad una trattazione unificata di
cose così diverse, quindi partiamo dal caso più semplice:
i fenomeni dissipativi.
Resistenza meccanica
In Fig. 6 abbiamo visto una forza dissipativa meccanica, con le due
equazioni fondamentali: la 2.2 che tratta della Forza, e la 2.3 che
tratta dell'energia dissipata, in funzione della Resistenza meccanica
(che è la caratteristica dell'attrito) e della velocità
del corpo.
Nella 2.2 possiamo trascurare il segno, in quanto vogliamo considerare
la Forza che è necessario applicare al corpo di massa M per
mantenerlo in moto a velocità costante v, e questa forza,
per il III principio della dinamica (azione e reazione) è uguale
(in valore assoluto) e contraria (nel verso) alla forza generata
dall'attrito.
La 2.2 diviene quindi (in un banale passaggio matematico):
Rm = F
/ v
2.2'
Resistenza elettrica
C'è una totale somiglianza con la legge di Ohm:
Re
= V / i
3.1
anche la 2.3 ha una totale somiglianza formale con l'equazione
dell'energia dissipata da una resistenza:
Ed
= Re * i2
3.2
se identifichiamo la forza F con
la tensione V e la
velocità v con la
corrente i.
Questa identificazione è ragionevole, oltre che formalmente valida?
Da un punto di vista fisico la forza indica la capacità di
compiere un Lavoro, che si concretizza quando la forza viene applicata
ad un corpo e lo muove: il corpo quindi acquista velocità,
cioè energia cinetica.
La tensione elettrica viene detta anche “potenziale
elettrico” in quanto indica la capacità di compiere un
lavoro, che si concretizza quando viene applicata ad un dispositivo ed
in questo dispositivo scorre corrente: è la corrente che crea
calore (energia termica) o muove il cono dell'altoparlante
(energia cinetica), non la tensione.
Quindi l'analogia Forza – Voltaggio appare ragionevole.
La corrente ci dice quanti elettroni attraversano il dispositivo
nell'unità di tempo: si parla pertanto di “Flusso”.
La velocità di un
corpo ci dice (è una definizione un po' grossolana, ma
sostanzialmente corretta) quanta materia attraversa lo spazio
nell'unità di tempo: anche per la velocità si può
quindi ragionare in termini di “Flusso”.
Anche l'analogia velocità –
corrente è quindi ragionevole.
Resistenza
acustica
Nel campo dell'acustica ha senso un concetto di Resistenza acustica?
Qui il ragionamento deve essere più articolato.
Se partiamo dalla dinamica dei fluidi (cioè il comportamento di
un gas in movimento) vediamo facilmente che, per comprenderne il
funzionamento, dobbiamo passare dal concetto di Forza a quello di
Pressione, che non è altro che una Forza per unità di
Superficie.
E' esperienza comune che si soffia meglio in un tubo corto e di sezione
grande che in un tubo lungo e sottile: nel primo passa più aria
per unità di tempo rispetto al secondo, a parità di
pressione.
Ciò che caratterizza il moto del gas è la quantità
di gas che attraversa una superficie (che può essere una sezione
del condotto del Risuonatore di Helmholtz di Fig. 11 oppure una
superficie ideale parallela al pistone di Fig. 12)
nell'unità di tempo: anche qui vale il concetto di
“Flusso”.
Il caso generico dell'aria contenuta in un tubo è rappresentato in Fig.
13
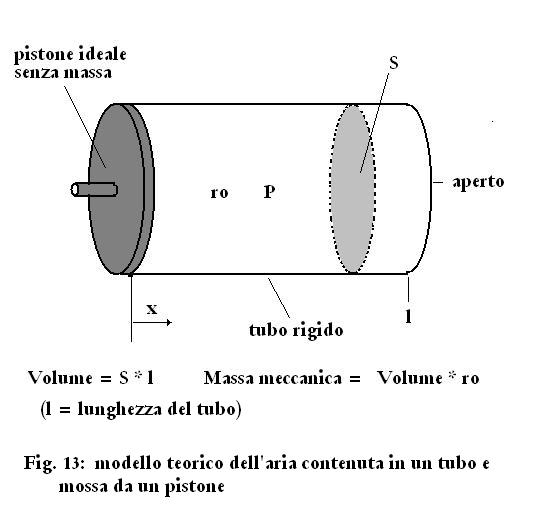 La
quantità di gas, ad esempio contenuta nel condotto del
risuonatore, è definita dal suo volume, quindi dalla superficie
per la lunghezza del condotto. La
quantità di gas, ad esempio contenuta nel condotto del
risuonatore, è definita dal suo volume, quindi dalla superficie
per la lunghezza del condotto.
Ciò che caratterizza un flusso di gas è detto
“velocità di volume”, che identifica il volume di
gas che attraversa una superficie nell'unità di tempo: parliamo
di volume geometrico, il volume di gas moltiplicato per la
densità del gas ci riporta alla massa di gas, e si torna al
concetto meccanico di massa.
Diamo le seguenti definizioni:
u =
S * v
3.3
dove u
è la “velocità di volume”, S
è la superficie della sezione attraversata dal gas, v è la velocità media delle
molecole di gas.
Nel caso del suono non abbiamo un flusso costante di gas, ma un flusso
alternato, in quanto il suono è costituito da onde di pressione,
quindi da addensamenti e rarefazioni del gas.
Per creare questi addensamenti e rarefazioni le molecole compiono un
percorso che nel gas a pressione “normale” è molto
maggiore del percorso che le molecole compiono quando si urtano
reciprocamente nel loro moto termico: teniamo conto che la lunghezza
d'onda del suono è molto grande rispetto alla distanza fra le
molecole ed inoltre l'escursione di un cono si misura in millimetri,
non in milionesimi di millimetro.
Quindi anche nel caso del suono ha senso parlare di velocità di
volume e di flusso: semplicemente sono alternati anziché
continui.
Ciò che il suono trasmette all'ambiente in modo pressoché
continuo è l'energia acustica, come una resistenza che è
percorsa dalla corrente trasmette all'ambiente energia termica.
Assumendo che il gas contenuto in un tubo si muova come un corpo
rigido, quindi per velocità di volume
abbastanza basse da non creare turbolenze e trascurando il moto non uniforme del gas
vicino alle pareti del tubo, si assume che una pressione P
mantenga il gas in moto a velocità uniforme secondo la legge:
P
= Ra *
u
3.4
da cui la definizione di Resistenza acustica
Ra
= P / u
3.5
Analogie
preliminari
Dall'analogia formale fra
le equazioni delle forze dissipative:
Re
= V / i
Rm = F / v
Ra = P / u
possiamo stabilire perciò le
analogie formali:
Tensione
<->
Forza
<-> Pressione
concetto di Potenziale
Corrente
<-> Velocità
<-> Velocità di
volume
concetto di Flusso
Sono analogie formali fra
equazioni, fisicamente un corpo solido in moto non ha nulla a che
vedere con gli elettroni in un conduttore o l'agitazione delle molecole
di un gas, ma noi stiamo cercando un metodo di calcolo, non stiamo
indagando sulla natura della realtà.
Potremmo anche fare la
considerazione che i fenomeni meccanici ed i fenomeni acustici sono
simili anche da un punto di vista fisico, ciò che fisicamente
è totalmente diverso è il fenomeno elettrico, e noi
stiamo proprio cercando di calcolare i sistemi meccanici ed acustici
mediante un formalismo “elettrico”.
Partendo da un fenomeno
semplice, la dissipazione, abbiamo compiuto il primo passo: ragionare
per “analogie” può stare in piedi, se non altro da
un punto di vista formale, che è proprio ciò che a noi
interessa.
La Massa Acustica
Soffiare in un tubo corto e
di sezione grande è più facile che soffiare in un tubo
lungo e sottile: anche se il loro volume geometrico è lo stesso,
e quindi la massa meccanica dell'aria contenuta nei tubi è la
stessa, il comportamento dal punto di vista della pressione è
diverso, cioè è diverso il comportamento acustico.
Ciò suggerisce che il
concetto di massa acustica sia diverso da quello di massa meccanica, in
quanto questa non dipende dalla geometria del tubo.
Tutti i conti tornano
(risparmio i passaggi matematici) se la massa acustica si definisce
come:
Ma
= Mm / S2
4.1
Tenendo conto che la massa
meccanica dell'aria contenuta nel tubo è (Fig. 13):
Mm
= ro * S *
l
4.2
dove ro
è la densità dell'aria, S la sezione (superficie) del
tubo e l la lunghezza del tubo, si ottiene
Ma
= ( ro * l )
/ S
4.3
che ci dice che l'inerzia
dell'aria contenuta nel tubo (detta anche inertanza in termini
acustici) è proporzionale alla lunghezza del tubo ed
inversamente proporzionale alla sezione: tutto torna con
l'esperienza.
Un sistema elettrico oscillante
Vediamo ora un sistema non dissipativo, questa volta di natura
elettrica.
Supponiamo di avere un condensatore ed un induttore, entrambi ideali
(condensatore senza perdite e induttore con resistenza nulla) e
carichiamo il condensatore collegandolo ad una batteria; quando il
condensatore è carico lo stacchiamo dalla batteria e lo
colleghiamo all'induttore, come in Fig. 14.
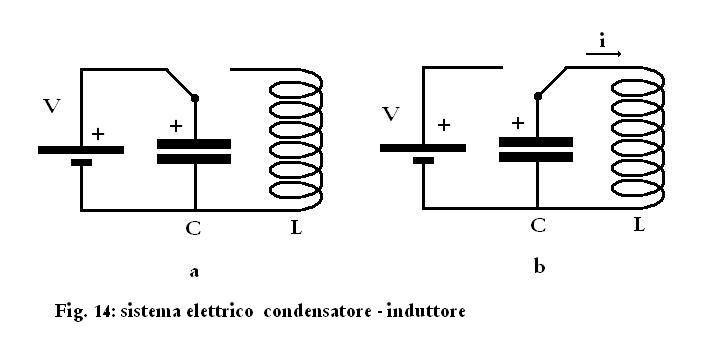
Nel primo passo (Fig. 14a) il condensatore ha accumulato una carica
elettrica, che gli ha conferito energia potenziale.
Quando il condensatore è carico la tensione ai suoi capi
è uguale a quella della batteria, non scorre più corrente
e il condensatore conserva la sua carica (quindi la sua energia) anche
quando viene scollegato dalla batteria; la sua energia è
potenziale in quanto, in mancanza di corrente, non viene eseguito alcun
lavoro.
Nel secondo passo (Fig. 14b) il condensatore inizia a scaricarsi
attraverso l'induttore, ma la caratteristica dell'induttanza è
di opporsi alle variazioni repentine di corrente, quindi la corrente
cresce lentamente (se collegate i due capi del condensatore con un
conduttore senza induttanza la corrente iniziale tende a infinito per
la legge di Ohm).
Credo sia immediato riconoscere la somiglianza con l'esempio della
molla e della massa di Fig. 3: tendendo la molla si carica di energia
potenziale, la massa acquista velocità lentamente a causa della
sua inerzia.
In Fig 15 è rappresentata l'evoluzione dello stato del sistema
elettrico.
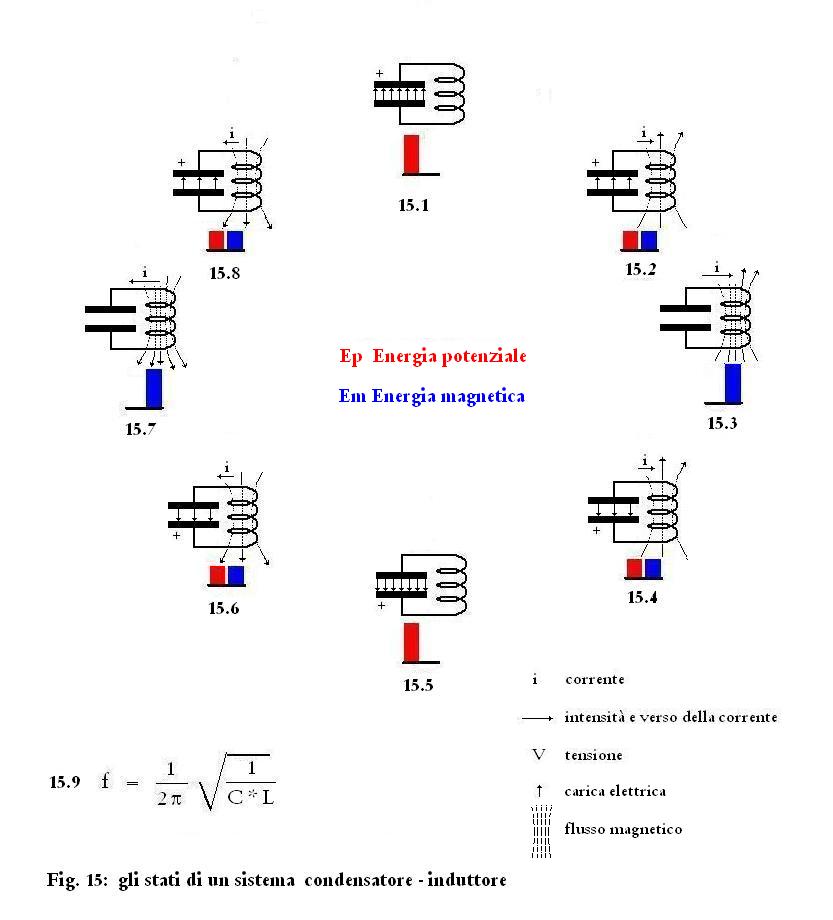
In 15.1 il condensatore è carico, da 15.2 a
15.3 il condensatore si scarica attraverso l'induttore, cedendo
energia potenziale, la corrente cresce creando un campo magnetico che
raggiunge il massimo quando il condensatore è scarico, in 15.3,
e l'energia magnetica è al massimo.
In un induttore la corrente non può variare istantaneamente,
quindi continua a scorrere e carica il condensatore in verso opposto,
in 15.5, dove si presenta la situazione iniziale con il segno elettrico
invertito.
Quindi il processo si ripete fino a tornare alla condizione iniziale e
ricomincia.
Anche qui la chiave è l'energia che si conserva: l'energia
conferita al condensatore all'inizio non può sparire, in assenza
di dissipazione, quindi si trasforma ciclicamente in potenziale prima e
magnetica poi.
Si genera quindi una oscillazione, con la frequenza definita dalla Fig.
15.9.
Si vede immediatamente che la dinamica degli stati è esattamente
uguale a quella della Fig. 4, il condensatore che accumula carica e
quindi energia potenziale (elettrica) ha un comportamento analogo a
quello della molla, che “accumula” spostamento e quindi
energia potenziale (meccanica, elastica), l'induttore che si oppone al
cambiamento istantaneo della corrente ed accumula energia magnetica si
comporta come la massa che si oppone al cambiamento istantaneo di
velocità ed accumula energia cinetica.
Le equazioni che definiscono le frequenze di risonanza hanno
esattamente la stessa forma, se stabiliamo le analogie:
K
<-> 1 / C M
<-> L
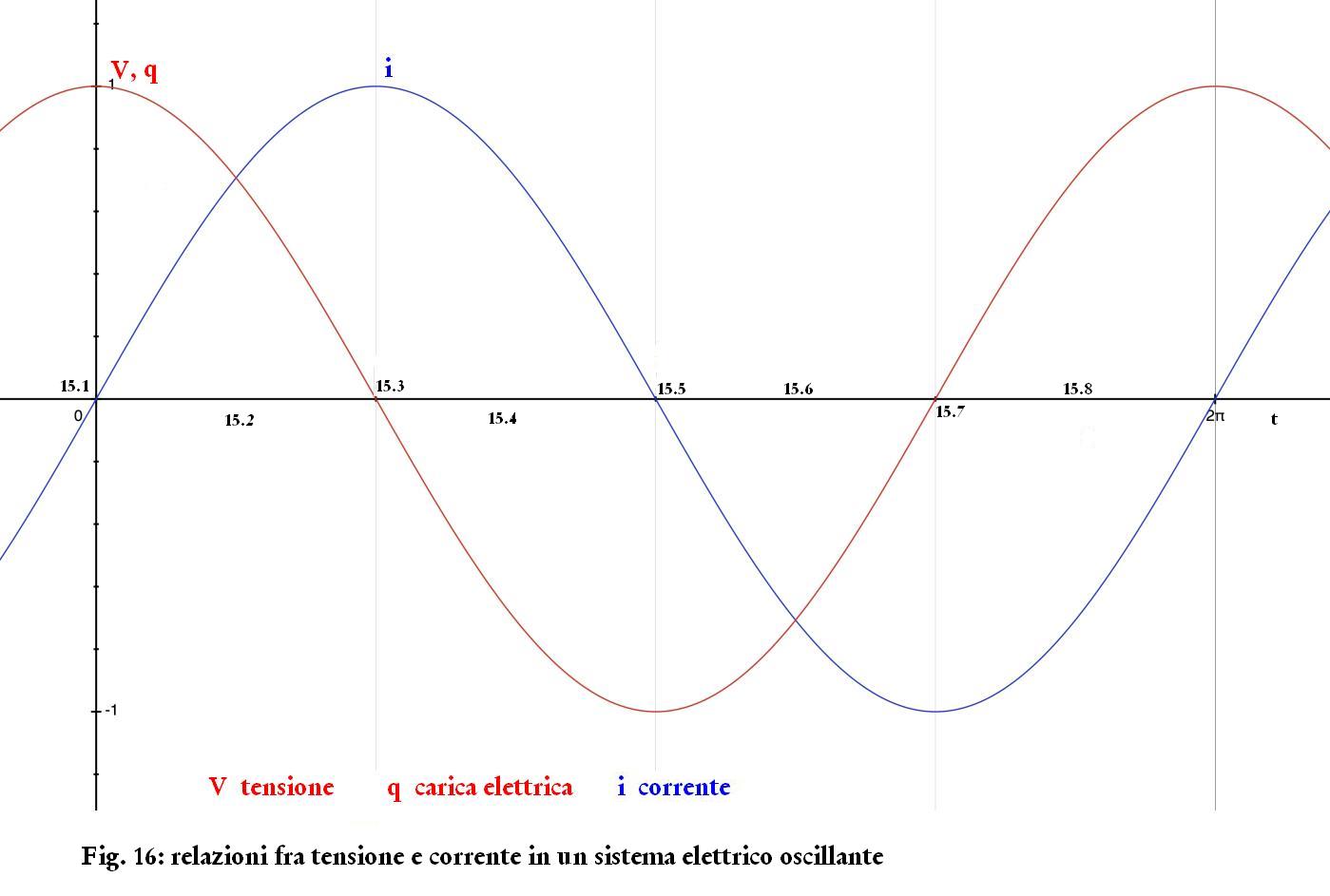
Nella Fig. 16 si vede che, tenuto conto dei necessari cambiamenti
di segno, la relazione fra la carica e la corrente è
perfettamente analoga alla la relazione fra la velocità e lo
spostamento di Fig. 5.
Abbiamo chiuso il
cerchio, abbiamo visto che nel formalismo matematico le mele e le pere
si equivalgono quindi si può analizzare qualche cosa fingendo
che sia qualche cosa d'altro, se non si pretende di stabilire
eguaglianze sostanziali.
Riassumiamo
La Fig. 17 riassume le
leggi della dinamica dei tre sistemi
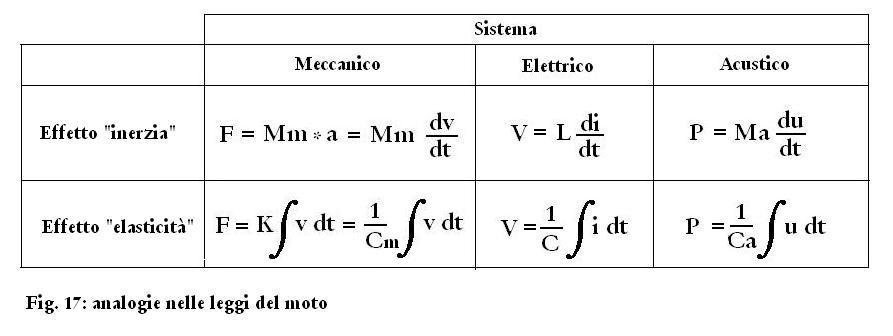
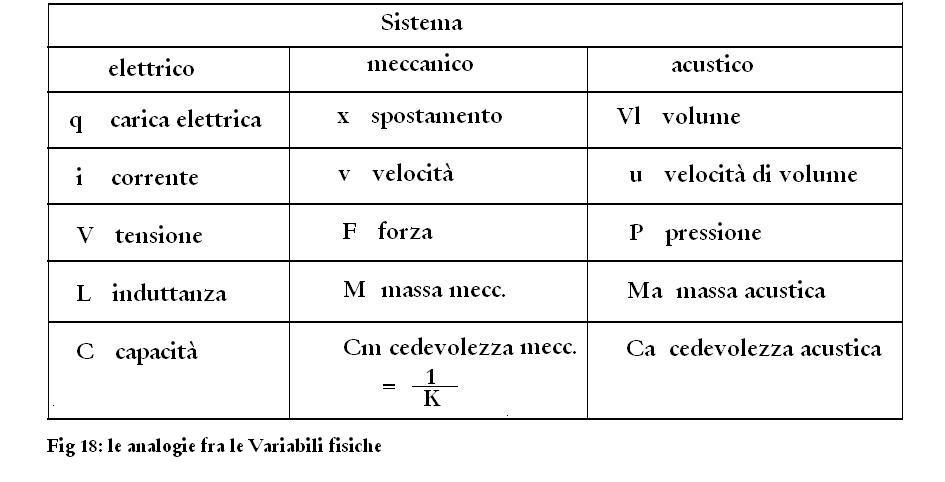
E' evidente la somiglianza formale delle equazioni, che ci ha
portato a stabilire l'analogia fra le variabili, riassunta in Fig 18.
In Fig. 19 è riepilogato il comportamento dei sistemi dal punto di
vista energetico:
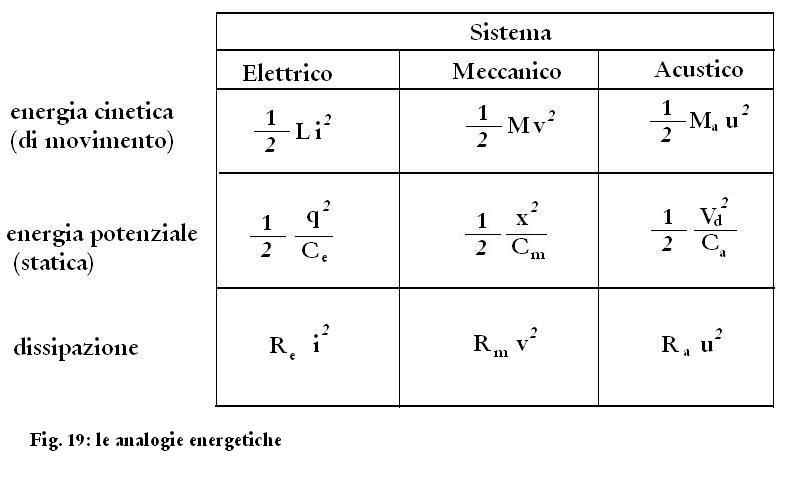
Anche le equazioni dell'energia sono formalmente identiche.
I “Generatori” nei sistemi dissipativi
Fino ad ora abbiamo parlato di sistemi semplici, tranne in un caso: il
caso del “moto armonico smorzato forzato” di Fig. 6, in cui
abbiamo introdotto il concetto dell'energia “dissipata”.
Dal punto di vista dell'Energia, per qualsiasi sistema è valido
il Principio di Conservazione dell'Energia, che stabilisce:
Ep + Ec + Ed =
Eg 5.1
la somma dell'Energia cinetica Ec,
dell'Energia Potenziale Ep e
dell'Energia ceduta all'ambiente Ed
è uguale alla energia fornita dal generatore Eg:
l'energia ceduta all'ambiente può essere energia meccanica
dissipata in attriti (quindi trasformata in calore), energia termica
generata dalla corrente elettrica in un resistore oppure energia
acustica.
In un diffusore tutti questi tipi di energia coesistono, ed il loro
scopo è proprio una parte dell'energia dispersa.
Se torniamo per un momento al modello teorico di Fig. 1 vediamo che
dobbiamo ancora esaminatre un elemento per arrivare alla fine.
I sistemi che ci interessa studiare sono sistemi che trasformano
l'energia elettrica in energia acustica: sono sistemi diffusori che
“suonano” perché ricevono un segnale elettrico da un
“generatore”, che è l'amplificatore.
Il generatore è quindi l'elemento che manca per poter costruire modelli
completi.
In Fig 20 sono riportati i tre modelli equivalenti di un diffusore bass
reflex: i tre modelli sono tratti da “Loudspeakers in
Vented Boxes: Part I” di A. N. Thiele, e sono i modelli su cui
sono basati la maggior parte dei simulatori.
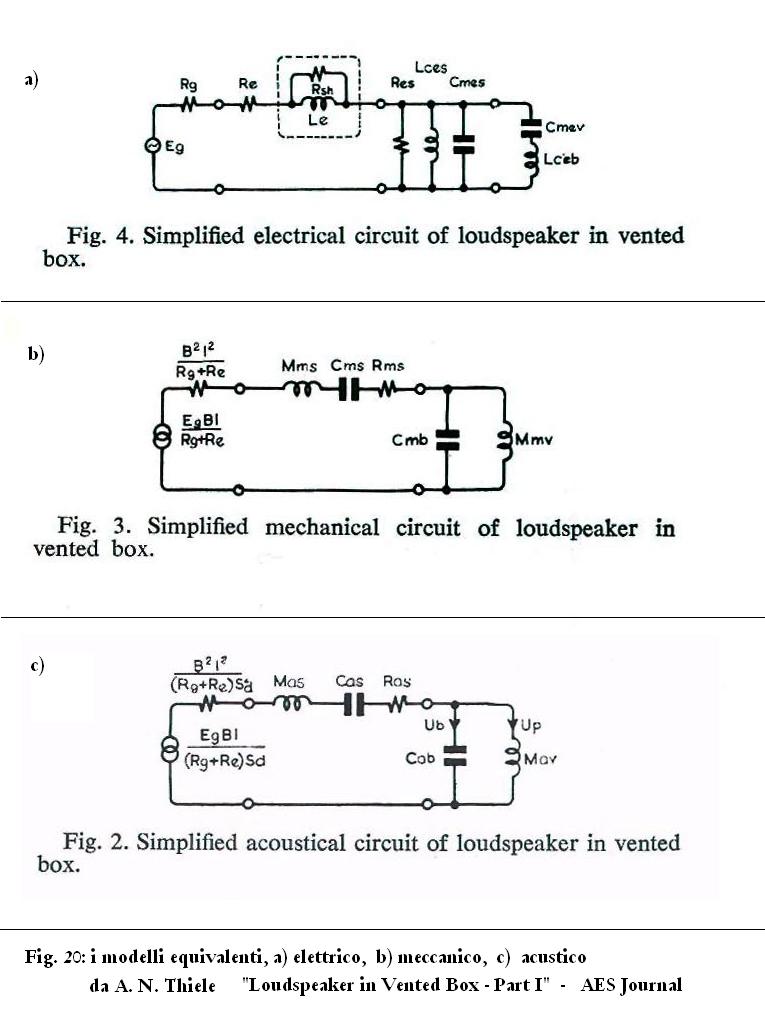
Concentriamoci sui generatori:
Nel modello equivalente
elettrico
(Fig. 20a) il generatore reale (il nostro amplificatore) è
modellizzato mediante un generatore di tensione ideale, Eg , seguito dal
resistore Rg
che rappresenta l'impedenza di uscita dell'amplificatore: è una
approssimazione accettabile, dato che il modello totale è valido
a frequenze basse ( < circa 400 Hz, in funzione del diametro del
cono).
Nel modello
equivalente meccanico (Fig. 20b) il generatore è espresso come:
( Eg
/ ( Rg + Re ))
* B*l
5.1 (ho semplicemente
raggruppato i fattori)
dove il primo fattore (tra parentesi) è una corrente ed il secondo è il Fattore di Forza dell'altoparlante.
Quindi il generatore del modello meccanico è un generatore di Forza, e la Forza è l'analogo
meccanico della Tensione.
Nel modello
equivalente acustico (Fig. 20c) il generatore è espresso come:
[(
Eg / ( Rg + Re ))
* B*l )] /
S 5.2 (ho
semplicemente raggruppato i fattori in modo opportuno )
dove il primo fattore (tra parentesi quadra), è la Forza del modello meccanico ed
il secondo è la Superficie proiettata
del cono dell'altoparlante.
Quindi il generatore del modello acustico è un generatore di Pressione, e la Pressione è
l'analogo acustico della Tensione.
Ora il cerchio è veramente chiuso: tutti gli elementi hanno i loro
analoghi e possiamo modellizzare senza problemi.
Nei tre modelli presentati da Thiele, che sono perfettamente
corrispondenti a quelli presentati da Small
in “Vented-Box Loudspeaker System –
Part I: small signal analysis”,
una cosa salta all'occhio, o almeno dovrebbe: il circuito elettrico ha
una topologia (cioè la disposizione dei componenti) diversa dai
modelli meccanico ed acustico, che invece hanno topologie uguali.
La nostra analogia deve quindi essere applicata con un minimo di
attenzione, in quanto per alcuni aspetti non si comporta come
suggerirebbe l'intuizione, ma si può anche ragionare in modo
diverso ed ottenere tre topologie identiche.
Attenti ai tranelli
Ad una analisi comparata
dei circuiti equivalenti elettrico, meccanico ed acustico è
immediatamente evidente è che ciò che nel circuito
elettrico è in serie, nei circuiti meccanico ed acustico
è in parallelo, mentre ciò che nel circuito elettrico
è in parallelo, nei circuiti meccanico ed acustico
è in serie.
Per quanto ciò possa disorientarci, l'avevo in certo qual modo
già anticipato quando avevo insistito sul fatto che tutto il
ragionamento si basa sulla analogia formale fra le equazioni: il grande
fisico Feynman disse che equazioni simili hanno soluzioni simili, ma
ciò non implica che i fenomeni fisici che stanno sotto le
equazioni siano effettivamente simili, pertanto non siamo autorizzati a
spingere una analogia formale a stabilire analogie sostanziali.
Spesso sotto la matematica non c'è altro che matematica.
Torniamo sui nostri passi, e cerchiamo di capire che cosa, in una
costruzione che era ragionevole e sembrava intuitivamente solida, ci
porta ad un risultato che non è affatto intuitivo.
Perché il fatto
che il circuito elettrico debba essere concettualmente
“opposto” (serie diventa parallelo e viceversa) rispetto ai
circuiti meccanico ed acustico è assolutamente corretto,
nell'ambito e nei limiti del ragionamento che abbiamo fatto, ed il
metodo di calcolo funziona perfettamente.
Dobbiamo solo stare molto attenti, quando trasformiamo uno schema
nell'altro, a non farci trarre in inganno dall'analogia nella
costruzione del “duale” (“duale” è il
termine tecnico che esprime questo “essere opposto o
speculare”, e che è solo apparente).
Procediamo per gradi.
In elettrodinamica
valgono le leggi di Kirchoff, la legge delle correnti (KCL) e la legge
delle tensioni (KVL).
KCL afferma che la somma
algebrica delle correnti che confluiscono in un nodo (cioè che
scorrono attraverso componenti uniti nel nodo) è zero.
KVL afferma che la somma
algebrica delle differenze di potenziale ai capi di componenti che
formano una maglia è zero.
Se ci trasferiamo al
campo della meccanica e della dinamica dei fluidi, troviamo leggi
analoghe, che affermano che la somma algebrica delle forze, o
delle pressioni, che agiscono su un corpo è zero e la somma
algebrica delle velocità, o dei flussi (velocità di
volume) in un punto è zero.
In realtà ciò è vero per i fluidi non
comprimibili: la quantità di fluido che entra in un recipiente
nell'unità di tempo deve essere uguale alla quantità che
ne esce nello stesso tempo.
Per un gas ciò non
è vero in termini generali, ma noi stiamo trattando sistemi
acustici che operano in ambiente a pressione costante: sui tempi brevi
rispetto al periodo dell'onda che ci interessa il fluido si comporta
come se fosse non comprimibile.
Tutta la trattazione
teorica del comportamento dell'aria nel condotto in un risuonatore di
Helmholtz, come anche la trattazione del comportamento dell'aria in un
contenitore chiuso, si basa su questo assunto: è una
approssimazione non da poco, ma è esattamente ciò che si
fa quando si afferma che i modelli su cui si basa la nostra analogia (e
quindi, per inciso, tutti i modelli su cui sono basate le teorie di
Novak, Beranek, Thiele e Small ecc) valgono per frequenza inferiori a
400 Hz per altoparlanti con diaframma da 15”, piuttosto che per
dimensioni del condotto “piccole” rispetto alla lunghezza
d'onda del suono alla frequenza di accordo del reflex ma “grandi
abbastanza” per poter trascurare gli effetti di turbolenza lungo
le pareti del condotto stesso.
In altre parole l'ambito
in cui le analogie sono valide è nettamente definito, ed anche
assai limitato, ed inoltre non è generalizzabile in modo
indiscriminato.
Analogia meccanica: è intuitiva, ma fino a che punto?
Se accettiamo l'analogia che abbiamo definito prima, la forza si
comporta come una tensione: una tensione “spinge” gli
elettroni (la corrente) attraverso una resistenza, una forza spinge ad
una data velocità un corpo soggetto ad un dato attrito: è
molto intuitivo, la forza è come la tensione, l'attrito
(resistenza meccanica) è come la resistenza elettrica, la
corrente elettrica è come la velocità di spostamento.
Allo stesso modo la
corrente che scorre in un induttore, e che tende a restare costante per
il principio di conservazione dell'energia (in questo caso energia
magnetica), si comporta come la velocità di un corpo di una data
massa, che in assenza di vincoli ed attriti tende a restare costante
per lo stesso principio di conservazione dell'energia (in questo caso
energia cinetica).
E in modo simile una
molla ed una cavità piena di aria si comportano come condensatori.
L'energia cinetica e
l'energia magnetica sono entrambe legate al movimento (di una massa o
di elettroni), e come abbiamo visto le equazioni dell'energia sono le
stesse, come sono identiche tutte le equazioni che governano le
velocità, le correnti, i flussi, le cariche, gli spostamenti, le
forze, le pressioni ecc.
Ma se tutto è così “identico”, cos'è
che può non funzionare? In realtà qualche cosa può
non funzionare solo se cerchiamo di “forzare” l'analogia
applicandola in modo meccanico, senza ragionare a fondo sulla natura
reale dei fenomeni cui la applichiamo.
Il ragionamento da fare è articolato, e sarà condotto in due fasi
successive.
Il primo passo è capire
come si costruisce un modello meccanico ed acustico usando un
formalismo elettrico.
Il secondo passo consiste
nell'analizzare le differenze fra il modello meccanico ed il modello
elettrico dello stesso sistema (il modello acustico, come abbiamo
già detto, è sostanzialmente simile al modello meccanico).
Come premessa al ragionamento parliamo di impedenze.
Fino ad ora ho parlato solo di Resistenze, che sono forze dissipative,
e, almeno per la meccanica e l'elettricità, sono valide solo in
regime continuo.
Quando si tratta di altoparlanti si ragiona invece nel dominio delle
frequenze e non si parla più di sola resistenza, ma anche di
Impedenza.
Per altro la definizione
di impedenza dal punto di vista formale, quando espressa in modo
sintetico, senza esplicitare le componenti reale ed immaginaria,
è perfettamente identica a quella della resistenza: nel
caso elettrico abbiamo la seguente definizione
Ze = V /
I
6.1
che è la “fotocopia” della legge di Ohm, tranne che
in questo caso i termini dipendono dalla frequenza, mentre nel caso
meccanico abbiamo
Zm =
Fm / v
6.2
che è la “fotocopia” della equazione 2.2.
L'impedenza di un
componente ideale non dissipativo (un condensatore perfetto, una
induttanza perfetta, un gas perfetto contenuto in una cavità
dalle pareti perfettamente rigide senza scambio termico e senza
turbolenze ecc) è non dissipativa: in altre parole non esiste la
componente resistiva (o la parte reale dell'espressione analitica).
I sistemi reali sono
sempre parzialmente dissipativi, quindi qualsiasi Impedenza (elettrica,
meccanica, acustica) contiene una parte dissipativa.
A titolo di esempio, limitandoci all'esempio elettrico,
l'impedenza di un circuito risonante serie ideale è esattamente
zero alla frequenza di risonanza, mentre in un circuito reale non
è zero (è pari per lo meno alla resistenza ohmica
dell'induttore reale con cui è costruito il circuito risonante).
Nel seguito i grafici di impedenze saranno sempre quelli di sistemi
reali, anche quando i circuiti equivalenti alla base del ragionamento
sono circuiti ideali.
Esempio meccanico
Nel corso della prima puntata avevo specificato, nell'esempio del
mestolo e dei due elastici, che dovevano essere in parallelo, non in
serie.
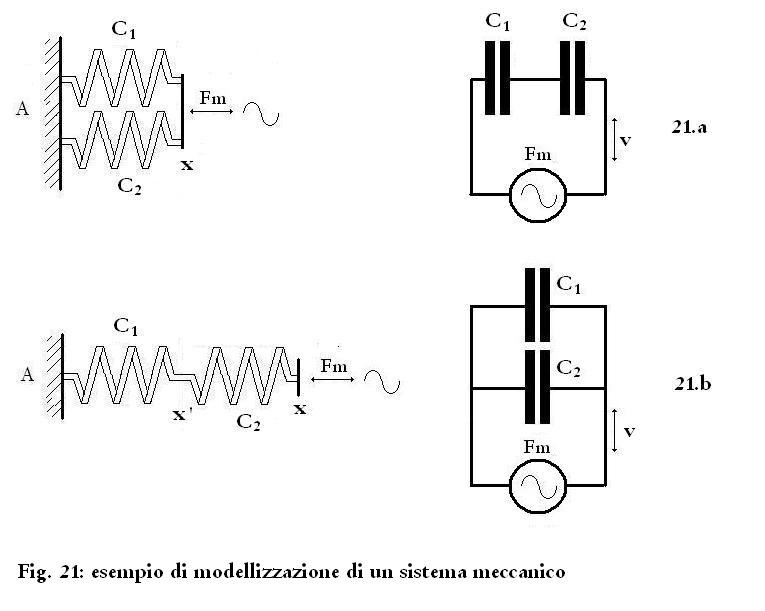
Partiamo con questo
esempio: in Fig. 21.a vediamo due molle C1 e C2 collegate in parallelo,
un capo ad un riferimento fisso (la “terra”), l'altro capo
fissato ad un riferimento rigido che è tenuto in movimento
vibratorio da una forza oscillante Fm.
Nel nostro sistema di
analogie abbiamo stabilito che lo spostamento si comporta come la
carica, la velocità come la corrente, la forza come la
tensione e la molla come un condensatore.
Il punto x si muove sotto
l'azione della forza, ed è chiaro, avendo stabilito che il
riferimento è rigido, che l'allungamento delle due molle
è uguale e che il punto x ha la stessa velocità per
ambedue le molle: stessa velocità = stessa corrente quindi nel
circuito equivalente meccanico, che abbiamo costruito usando il
formalismo elettrico, i due condensatori, per la Legge di Kirchoff
delle correnti, sono in serie.
Controprova: nell'esempio
di Fig. 21.b le molle sono in serie.
La forza in tutti i punti del sistema meccanico è uguale: nel
nostro esempio ideale non ci sono forze dissipative e quindi la molla
si allunga fino a che la forza elastica uguaglia la forza esterna
applicata: ogni molla trasmette al secondo estremo la forza applicata
al primo e pertanto al punto x' la forza è la stessa che al
punto x.
Lo spostamento in x' è
ovviamente minore dello spostamento in x, e di conseguenza le velocità
sono diverse.
Quindi stessa forza = stessa tensione ma correnti diverse, quindi per
le leggi di Kirchoff i due condensatori del circuito equivalente
meccanico, costruito con il formalismo elettrico, sono in parallelo.
Si può fare anche
un'altra considerazione che porta allo stesso risultato: il
condensatore non è equivalente alla costante elastica della
molla, ma alla sua cedevolezza, che è l'inverso della costante
elastica.
Una molla costituita da
due molle in parallelo (Fig. 21.a) è più rigida,
cioè ha una cedevolezza minore; una molla costituita da due
molle in serie è più debole (lo stesso spostamento si
ottiene con una forza minore), cioè la cedevolezza è
maggiore.
Esempio acustico
Applichiamo lo stesso tipo di ragionamento ad un sistema acustico su
cui ci siamo già soffermati: il risuonatore di Helmholtz
che abbiamo visto in Fig. 6.
Supponiamo una cavità con pareti rigide, con un tubo applicato
ad una parete della cavità (il sistema cavità –
tubo sia assolutamente rigido) ed un pistone senza massa ed in grado di
muoversi senza attrito, applicato ad un'altra parete.
Applichiamo una pressione
oscillante (un segnale acustico) al risuonatore, in due diversi scenari.
Supponiamo altresì
che le dimensioni fisiche della cavità e del tubo siano piccole
rispetto alla lunghezza d'onda generata dalla pressione oscillante che
applicheremo, ma le dimensioni trasversali del tubo siano
abbastanza grandi da permetterci di trascurare la viscosità
dell'aria nel suo movimento lungo la parete del tubo stesso (ancora
approssimazioni).
Distinguiamo i due casi possibili, rappresentati in Fig. 22: la
pressione oscillante viene applicata dal lato del tubo (Fig. 22.a) e la
pressione oscillante viene applicata dal lato del pistone (Fig. 22.b).
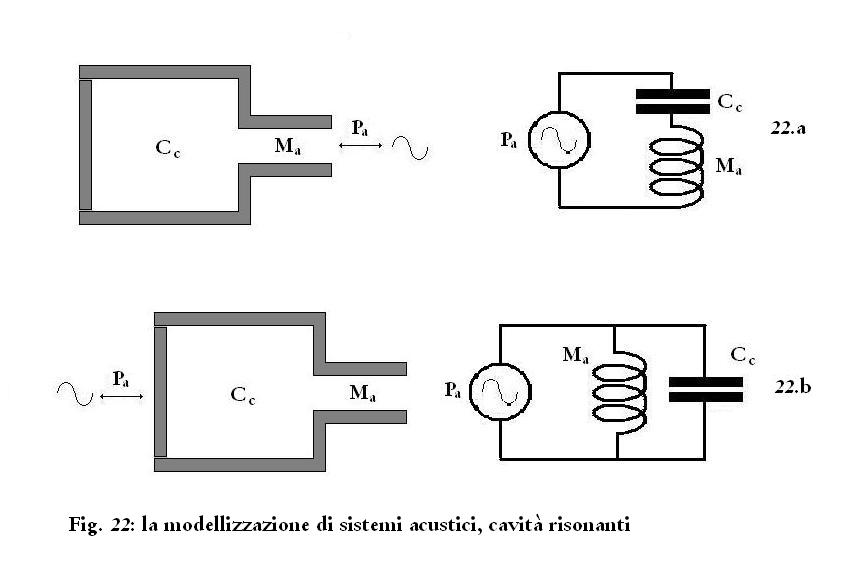
Nel primo caso (Fig.
22.a) il sistema si comporta come un tubo con due tratti con sezioni
diverse: in questo caso la velocità di volume è la stessa
per tutto il sistema (un altro nome per la “velocità di
volume” è: “portata”), cioè per il tubo
e per la cavità.
Nel circuito equivalente
acustico la cavità è rappresentata dal condensatore, la
massa dell'aria contenuta nel tubo dall'induttanza: l'analogo della
corrente (cioè la velocità di volume) è la stessa
e quindi i due elementi sono in serie.
Nel secondo caso (Fig. 22.b) la pressione agente sulla cavità e
sul tubo è la stessa quindi i due elementi debbono essere messi
in parallelo, nel circuito equivalente acustico.
In entrambi i casi abbiamo un risonatore acustico, nel primo caso si ha
una risonanza di portata, nel secondo caso una risonanza di pressione
(detta anche antirisonanza).
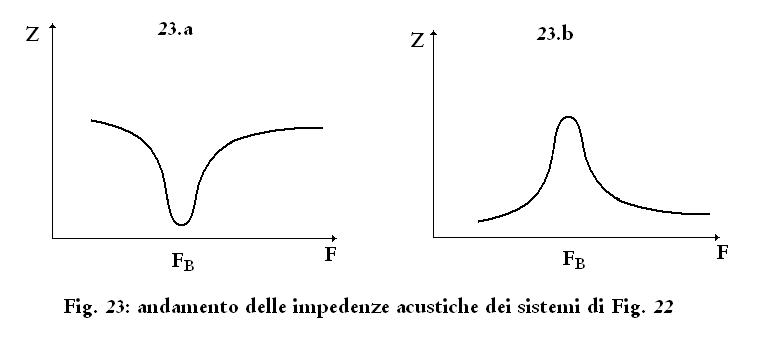
Il comportamento dei due sistemi è molto diverso: se analizziamo
l'impedenza acustica troviamo che nel primo caso (Fig. 23.a) presenta
un minimo alla frequenza di risonanza, come è ovvio per un
circuito risonante serie, mentre nel secondo caso (Fig. 23.b) presenta
un massimo, come è ovvio per un circuito risonante parallelo.
Il primo caso è quello del flauto, o della bottiglia che emette
un suono quando soffiamo dentro il collo: in questo caso si eccita la
risonanza dove l'impedenza acustica ha un minimo e quindi c'è il
minor impedimento alla vibrazione dell'aria, che quindi si muove con la
massima velocità (ed anche con il maggiore spostamento).
Il secondo caso è chiaramente simile ad un bass reflex: alla
frequenza di risonanza, che è la frequenza di accordo della
cassa, l'impedenza acustica è massima, quindi c'è il
massimo impedimento al movimento del pistone (cioè del cono).
Quindi alla frequenza di
accordo della cassa l'escursione del cono ha un minimo, mentre il
movimento della massa d'aria contenuta nel tubo ha il massimo: in un
diffusore reflex la pressione acustica emessa dal cono ha un
minimo alla frequenza di accordo della cassa e questo minimo di
emissione è compensato dall'emissione acustica del tubo di
accordo, che estende verso il basso l'emissione totale.
Un diffusore bass reflex reale è più complesso, in quanto
il pistone ha massa ed è collegato alla cavità dalla
sospensione, che è a sua volta una molla, e vi sono inoltre
forze dissipative, quindi abbiamo non più uno ma due sistemi
risonanti accoppiati sia meccanicamente che acusticamente, ma il
principio di funzionamento è esattamente lo stesso.
La “dualità”
meccanico-elettrica
Torniamo alla struttura di un altoparlante, rappresentata in Fig. 2,
che può essere rappresentata in modo sintetico dalla Fig. 6,
dove la forza Fm è
quella generata dalla bobina mobile, la massa è quella del cono
e la molla è la sospensione (ricordare la Fig. 1 aiuta a
raccogliere le idee).
È facile rendersi conto che il sistema è equivalente a
quello di Fig. 22.a: il primo è un sistema meccanico, il secondo
è un sistema acustico, ed in entrambi i casi abbiamo una massa,
una molla ed un generatore.
Il circuito equivalente è in entrambi i casi come quello di Fig.
22.a: un circuito risonante serie, che quindi presenta un minimo di
impedenza (acustica e rispettivamente meccanica) alla frequenza di
risonanza, come rappresentato in Fig. 23.a.
Quale è il comportamento elettrico del sistema?
La Fig. 7 ci può
aiutare a capire: dato che l'impedenza acustica e meccanica hanno un
minimo alla frequenza di risonanza (Fig. 23.a), la velocità di
spostamento del cono ha invece un massimo alla frequenza di risonanza.
La velocità ha un
massimo proprio perché alla frequenza di risonanza c'è
minore opposizione al movimento: dalla 6.2 ricaviamo infatti che
v = Fm / Zm
Se la velocità ha un massimo, anche le forze
contro-elettromotrici
generate dalla velocità dello spostamento del cono hanno un
massimo, e dato che le forze contro-elettromotrici sono appunto di
segno contrario alla forza elettromotrice prodotta dal generatore, la
corrente assorbita alla risonanza ha un minimo.
Dove la corrente ha un minimo l'impedenza deve avere un massimo (la
forza elettromotrice del generatore si suppone costante) e pertanto il
circuito equivalente elettrico “deve” essere un circuito
risonante parallelo.
Per un altoparlante in cassa chiusa il funzionamento è identico,
con l'unica differenza che alla forza elastica della sospensione si
aggiunge la forza elastica dell'aria contenuta nel box (meccanicamente
in parallelo), quindi il sistema è analogo ad un altoparlante
con sospensione più rigida.
In Fig. 24, tratta da “Closed-box
Loudspeaker System” di Richard Small, vediamo riassunto quanto
detto sopra.
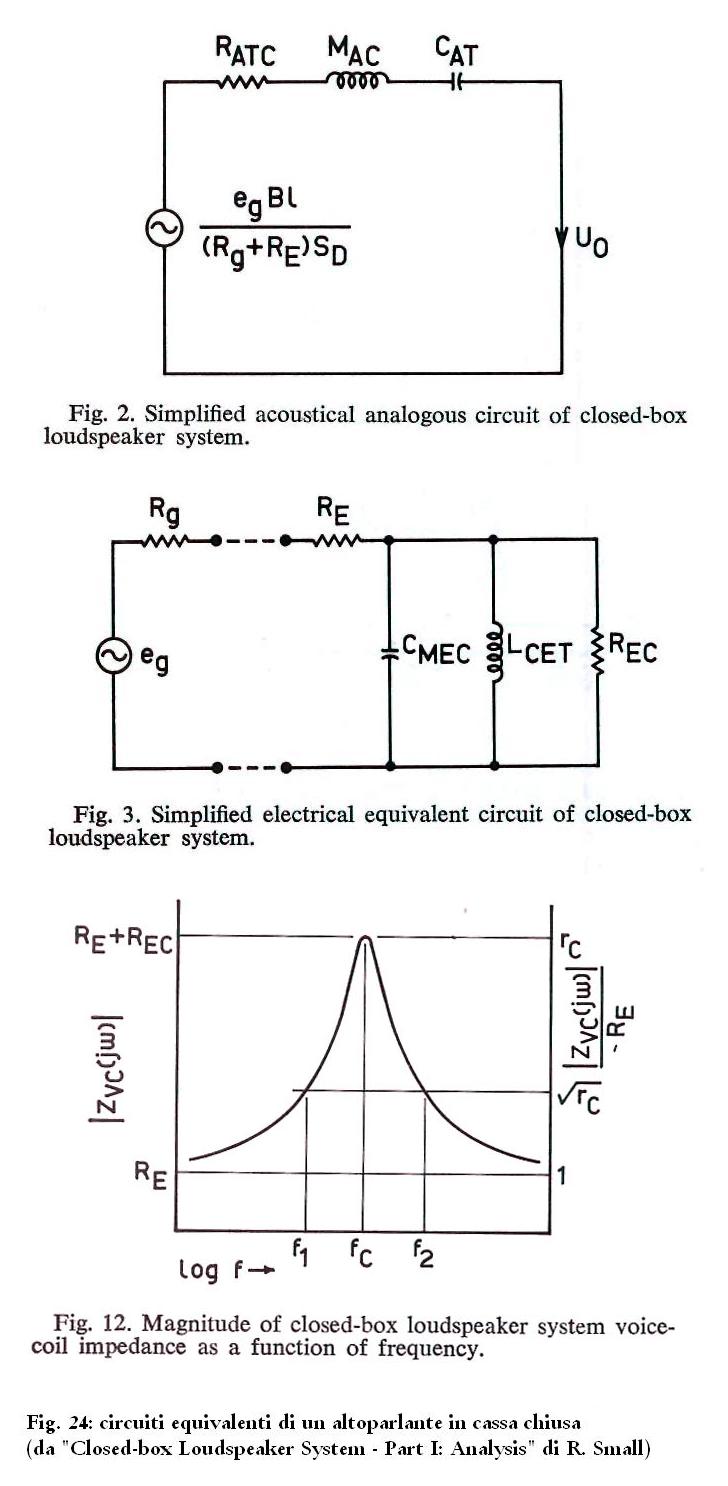
In base a queste considerazioni si giustifica il fatto che la topologia
dei circuiti equivalenti sia diversa.
Per concludere, cambiamo
prospettiva
Il ragionamento “per analogia” è un potente
strumento per trattare sistemi diversi con formalismi simili, ed una
volta che si sia assimilata la scomodità di avere topologie
diverse, si sia imparato a costruire i “duali” e si abbiano
ben presenti i principi fisici su cui si basano le analogie ed i loro
limiti, tutto funziona perfettamente ed i nostri simulatori ci daranno
ottimi risultati.
In linea di massima il circuito equivalente elettrico tratta impedenze,
il circuito meccanico tratta escursioni ed il circuito acustico tratta
pressioni acustiche (cioè curve di risposta).
Quindi tutto bene.
Ma se il cambio di
topologia ci dà concettualmente fastidio? Se volessimo un
modello unificato che in un unico circuito equivalente esprimesse
impedenze, escursioni, pressioni?
C'è qualche altro modo di
affrontare il problema?
Ciò che abbiamo visto finora va sotto il nome di “Analogia
dell'impedenza” o “Analogia di Maxwell”, ed è
basata sull'equivalenza che abbiamo stabilito fra Forza e Tensione,
nella definizione dei potenziali, e fra Velocità e Corrente,
nella definizione dei flussi.
Che cosa succede se decidiamo di usare equivalenze diverse? Innanzi
tutto, è possibile usare equivalenze diverse?
L'analogia che abbiamo usato finora, con le sue equivalenze, è
basata solo sulla analogie formali fra equazioni (l'ho ripetuto fino
alla noia) e quindi qualsiasi analogia formale fra equazioni che non
dia luogo a contraddizioni è altrettanto valida.
Definiamo quindi le seguenti equivalenze:
Velocità
<-> Portata (Velocità di Volume)
<-> Tensione
concetto di Potenziale
Forza
<-> Pressione
<-> Corrente
concetto di Flusso
Con queste equivalenze le equazioni base diventano quelle di Fig. 25:
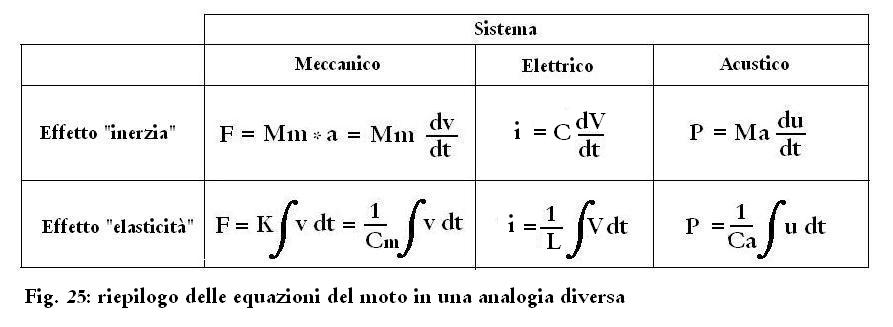
e le variabili utilizzate cambiano:
Massa
<->
Capacità
Forza elastica
<-> Induttanza
Ovviamente il cambiamento si ha solo nel sistema Elettrico, che è
l'oggetto dell'analogia.
Mentre nel caso dell'analogia di Maxwell l'analogia del sistema
elastico è stabilita fra la Cedevolezza
della molla e la Capacità,
in questo caso l'analogia del sistema elastico è stabilita fra la Cedevolezza e l'Induttanza, ma il risultato è che due molle in parallelo si comportano
come due induttanze in parallelo.
E' un risultato non da poco: con questo tipo di analogia la topologia
dei circuiti equivalenti viene conservata.
È più difficile stabilire
una somiglianza intuitiva fra Velocità
e Tensione, come pure fra Forza e Corrente,
rispetto alla somiglianza più “facile” dell'analogia
di Maxwell, ma la conservazione della topologia rende più facile
costruire i modelli equivalenti (sono tutti uguali) e soprattutto,
venendo a mancare le “dualità” si può
costruire un modello unico che esprima le proprietà elettriche,
meccaniche ed acustiche, cioè costruire un unico circuito
equivalente che rappresenti esattamente la Fig. 1.
Questo tipo di analogia è detto “Analogia
della Mobilità” o “Analogia di
Firestone”.
Conclusioni
Sicuramente qualcuno si sta chiedendo se tutto questo non sia una
versione speciale del gioco delle tre carte.
La risposta sta tutta in
quanto scritto all'inizio di questa puntata:
“ equazioni
simili hanno soluzioni simili”
e quello che noi stiamo cercando è un metodo di calcolo, non la natura
ultima delle leggi fisiche.
Anche l'analogia di
Firestone funziona perfettamente, e pur essendo meno intuitiva ha
qualche vantaggio rispetto a quella di Maxwell.
Proprio perché stiamo cercando soluzioni di equazioni e non la
natura nascosta delle leggi fisiche possiamo stabilire anche altri tipi
di analogie, e purché si proceda con coerenza tutte possono
funzionare e dare risultati corretti.
Ciò che non si deve
dimenticare è che tutte le analogie sono formali, che non è lecito derivare
proprietà sostanziali da
analogie formali (“ ... ciò non implica che i fenomeni
fisici che stanno sotto le equazioni siano effettivamente simili...”)
e soprattutto che l'ambito di funzionamento delle analogie e quindi dei
modelli costruiti sulla base di esse è pesantemente limitato da
tutte le approssimazioni fatte per costruirle.
.
|
